Принципы измерения магнитных полей, приборы для измерения параметров магнитного поля
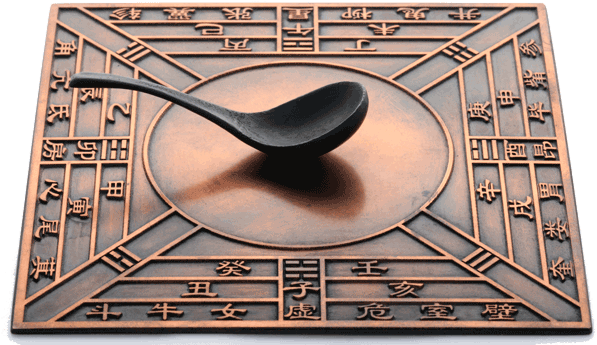
Первые магнитные компасы, указывающие направления на магнитные полюса Земли, появились еще в третьем веке до Нашей эры на территории Китая. Это были приборы в форме круглых разливательных ложек с короткими ручками, изготовленные из магнитного железняка.
Ложку ставили выпуклой частью на гладкую медную или деревянную поверхность, по которой вокруг были нанесены деления с изображениями знаков зодиака, обозначающие стороны света. Чтобы привести компас в действие, ложку слегка подталкивали, и она начинала вращаться. В конце концов, когда ложка останавливалась, ее ручка указывала точно на южный магнитный полюс Земли.
Начиная с двенадцатого века компасы активно начали применяться путешественниками в Европе. Их устанавливали как на сухопутном транспорте, так и на морских судах, с целью определения магнитного склонения.
С конца восемнадцатого века магнитные явления стали объектом пристального внимания и изучения для ученых того времени. Кулон в 1785 году предложил метод количественной оценки напряженности магнитного поля Земли. В 1832 году Гаусс показал возможность определения абсолютного значения напряженности магнитного поля путем более точных измерений.
Связь между магнитными явлениями и силовыми эффектами, наблюдаемыми во время движения электрических зарядов, впервые в 1820 году установил Эрстед. Позже Максвелл запишет эту связь в рациональной форме — в форме математических уравнений (1873 год):

На сегодняшний день для измерения параметров магнитного поля применяется следующая техника:
тесламетры — приборы для измерения величин напряженности Н или индукции магнитного поля В;
веберметры — приборы для измерения величины магнитного потока Ф;
градиентометры — приборы для измерения неоднородностей магнитного поля.
приборы для измерения магнитного момента М;
приборы для измерения направления вектора В;
приборы для измерения магнитных постоянных различных материалов.

Вектор магнитной индукции B характеризует интенсивность силового действия со стороны магнитного поля (на полюс или на ток) и поэтому является его главной характеристикой в данной точке пространства.
Таким образом, исследуемое магнитное поле может взаимодействовать силовым образом либо с магнитом, либо с элементом тока, а также способно наводить ЭДС индукции в контуре, если магнитное поле, пронизывающее контур, изменяется с течением времени, либо если контур изменяет сове положение относительно магнитного поля.
На элемент проводника с током длиной dl в магнитном поле с индукцией B будет действовать сила F, величина которой может быть найдена с помощью следующей формулы:
Значит индукция B исследуемого магнитного поля может быть найдена по силе F, которая действует на проводник заданной длины l, с постоянным током известной величины I, помещенный в это магнитное поле.
Практически магнитные измерения удобно проводить, используя величину, называемую магнитным моментом. Магнитный момент Pm характеризует контур площади S с током I, а величина магнитного момента определяется так:
Если используется катушка из N витков, то ее магнитный момент будет равен:
Механический момент M силового магнитного взаимодействия может быть найден исходя из значений магнитного момента Pm и индукции магнитного поля B следующим образом:
Однако для измерения магнитного поля не всегда удобно пользоваться его механическими силовыми проявлениями. Благо, есть еще одно явление, на которое можно опереться. Это явление электромагнитной индукции. Закон электромагнитной индукции в математической форме записывается так:
Итак, магнитное поле проявляет себя силами либо наводимой ЭДС. При этом источником самого магнитного поля, как известно, является электрический ток.
Если ток порождающий магнитное поле в данной точке пространства известен, то напряженность магнитного поля в этой точке (на расстоянии r от элемента тока) можно найти с помощью закона Био-Савара-Лапласа:
Стоит отметить, что магнитная индукция B в вакууме связана с напряженностью магнитного поля H (порожденного соответствующим током) следующим соотношением:
Магнитная постоянная вакуума в системе СИ определяется через ампер. Для произвольной же среды данная константа есть отношение магнитной индукции в данной среде к магнитной индукции в вакууме, и называется эта константа магнитной проницаемостью среды:
Магнитная проницаемость воздуха практически совпадает с магнитной проницаемостью вакуума, поэтому для воздуха магнитная индукция B практически тождественна напряженности магнитного поля H.
Единица измерения магнитной индукции в системе СИ — тесла [Тл], в системе СГС — Гаусс [Гс], причем 1 Тл = 10000 Гс. Измерительные приборы для определения индукции магнитного поля, называются тесламетрами.

Напряженность H магнитного поля измеряется в амперах на метр (А/м), причем 1 ампер/метр задается как напряженность магнитного поля соленоида бесконечной длины с единичной плотностью витков, при протекании по данному соленоиду тока в 1 ампер. Один ампер на метр можно определить и иначе: это напряженность магнитного поля в центре круглого витка с током в 1 ампер при диаметре витка в 1 метр.
Здесь же стоить отметить такую величину как магнитный поток индукции — Ф. Это — скалярная величина, в системе СИ она измеряемая в веберах, а в системе СГС — в максвеллах, причем 1 мкс = 0,00000001 Вб. 1 Вебер — это магнитный поток такой величины, что при убывании его до нуля, по сцепленной с ним проводящей цепи сопротивлением 1 Ом, пройдет заряд в 1 Кулон.
Если принять за исходную величину магнитный поток Ф, то индукция магнитного поля B – это будет не что иное, как плотность магнитного потока. Приборы для измерения магнитного потока называются веберметрами.

Выше мы отметили, что магнитная индукция может быть определена либо через силу (или через механический момент), либо через наводимую в контуре ЭДС. Это так называемые прямые измерительные преобразования, при которых магнитный поток или магнитная индукция выражаются через другую физическую величину, (силу, заряд, момент, разность потенциалов) которая однозначно связана с магнитной величиной посредством фундаментального физического закона.
Преобразования же, где магнитная индукция B или магнитный поток Ф находятся через ток I либо длину l или радиус r, называются обратными преобразованиями. Такие преобразования выполняются с опорой на закон Био-Савара-Лапласа, с использованием известного соотношения между магнитной индукцией B и напряженностью магнитного поля H.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Принципиальные методы измерения напряженности и индукции магнитного поля в магнетиках
Прямое измерение индукции магнитного поля при помощи витка с током основано на явлении электромагнитной индукции Фарадея.
Напомним один из основных законов электромагнетизма.
Закон электромагнитной индукции Фарадея
При изменении магнитного потока, проходящего через замкнутый контур, в контуре возникает ЭДС индукции.
Скорость изменения магнитного потока через замкнутый контур по модулю равна ЭДС индукции, возникающей в контуре.
Как измерить индукцию магнитного поля прямым методом? Сначала проводник в виде небольшой плоской петли замыкают на гальванометр и ориентируют так, чтобы линии магнитной индукции магнитного поля были перпендикулярны плоскости проводника. Затем проводник поворачивают вокруг своей оси на 90 ° . По закону электромагнитной индукции через гальванометр при этом должен пройти импульс тока. Измерив этот импульс, определяют среднее значение магнитной индукции B в области петли.
Косвенные методы измерение напряженности и индукции магнитного поля
Прямое (непосредственное) измерение величины B описанным выше способом возможно не всегда. Например, так невозможно измерить индукцию магнитного поля в веществе.
Необходимо принимать во внимание, что при переходе границы магнетика нормальные составляющие вектора магнитной индукции и тангенциальные составляющие вектора напряженности непрерывны.
Как измеряют вектор магнитной индукции в веществе? Для этого в исследуемом материале делают полость и проводят измерение. Также при обработке результатов учитывают форму полости.
Способ 1. В магнетике делают параллельный магнитному полю и бесконечно узкий канал. Так как канал бесконечно узкий, можно принять, что напряженность поля в нем и в окружающем магнетике одинаковы. В канал помещается пробный виток, измеряется величина магнитной индукции. Так как в канале отсутствует вещество магнетика и μ = 1 , получаем:
Способ 2. В магнетике создают бесконечно узкую щель. Удаление вещества, учитывая бесконечно малый размер щели, не сказывается на магнитном поле (удалением вещества можно пренебречь). Измеряя индукцию в щели, узнаем индукцию магнитного поля в веществе.
Пусть у нас есть электромагнит, состоящий из железного сердечника и катушек с током. Число витков с током равно N . Сердечник имеет узкий воздушный зазор длиной l v . По большей части линии магнитной индукции сосредоточены внутри сердечника и пересекают границу воздух-сердечник по нормали к поверхности раздела. Найти величину магнитной индукции в воздушном зазоре электромагнита.
Магнитная индукция в зазоре и сердечнике одинакова по модулю, если зазор бесконечно мал.
Применяя теорему о циркуляции вектора напряженности H → , получим выражения для напряженности в железе и воздухе.
Напряженность в железе равна H F e = B μ 0 μ F e . Напряженность в воздухе: H v = B μ 0 μ v . Циркуляция вектора напряженности запишется в виде:
H F e l F e + H v l v = N I
где I — сила тока в катушке, l F e — длина контура в железном сердечнике.
Подставим сюда записанные выше выражение для напряженности:
B μ 0 μ F e l F e + B μ 0 μ v l v = N I .
Отсюда выразим магнитную индукцию:
B = μ 0 l N l v μ v + l F e μ F e ≈ μ 0 l N l v + l F e μ F e .
Магнитная проницаемость железа велика, и соотношением l F e μ F e ≪ 1 можно пренебречь. Тогда выражение для индукции запишется в виде:
Измерение напряженности магнитного поля методом Гаусса
Данный метод применяется для измерения магнитного поля Земли.
Постоянные магниты — это магнетики, вектор намагниченности J → которых остается неизменным (или меняется незначительно) при внесении магнетика во внешнее магнитное поле.
На этом определении и базируется суть метода. Для измерения напряженности магнитного поля методом Гаусса берется постоянный магнит в форме стержня, намагниченный параллельно оси. Если поместить такой магнит в постоянное магнитное поле с индукцией B → , на него будет действовать вращающий магнитный момент M → .
Здесь P m → — магнитный момент стержня. Под действием момента M → стержень, вращаясь вокруг своего центра масс, придет в состояние равновесия и установится вдоль вектора поля B → . При небольших отклонениях от положения равновесия возникают колебания с периодом T = 2 π θ P m → B → , где θ — момент инерции стержня.
Магнит-стержень закрепляется перпендикулярно магнитному полю B → , а на расстоянии r от его центра помещается маленькая магнитная стрелка. Стержень можно считать магнитным диполем, а для магнитного поля стержня в месте нахождения стрелки можно записать:
Под воздействием полей B → и B → 1 стрелка установится под углом α к постоянному магнитному полю:
t g α = B 1 B = 2 P m B r 3 .
Измеряя период T и вычисляя угол α , находят магнитный момент стержня и значение индукции магнитного поля.
Измерение магнитной индукции и напряженности магнитного поля
Приборы для измерения магнитной индукции и напряженности магнитного поля (далее — МП) называются тесламетрами (Тм), по аналогии с измеряемой величиной. Процесс измерения магнитных величин более сложный, чем определение электрических величин, соответственно и приборы и схемы тоже сложнее.
Наиболее распространенными магнитоизмерительными приборами для определения индукции и напряженности являются: Тм с преобразователем Холла, ферромодуляционный и ядерно-резонансный тесламетр.
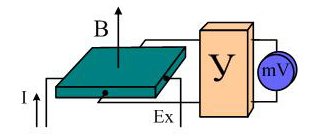 Тм с преобразователем Холла определяют параметры средних (от 10-5 до 10-1 Тл) и сильных (10-1 до102 Тл) МП. Принцип работы таких тесламетров основан на появлении ЭДС в полупроводниках, помещенных в зону влияния МП.
Тм с преобразователем Холла определяют параметры средних (от 10-5 до 10-1 Тл) и сильных (10-1 до102 Тл) МП. Принцип работы таких тесламетров основан на появлении ЭДС в полупроводниках, помещенных в зону влияния МП.
При этом вектор магнитной индукции искомого МП должен быть перпендикулярен пластине полупроводника.
Через тело полупроводника протекает электрический ток I. В результате на боковых гранях пластины образуется разность потенциалов, которую называют ЭДС Холла. ЭДС определяется компенсационным методом или милливольтметром, шкала которого градуирована в теслах. На практике ЭДС Холла зависит от следующих параметров:
где С – коэффициент, учитывающий конструктивные параметры пластины полупроводника; I – сила тока, А; В – магнитная индукция, Тл.
Зная силу тока I, коэффициент С и значение Ех, прибор градуируют в единицах измерения МП, при условии, что сила тока постоянна.
Тм с преобразователем Холла просты в применении, имеют небольшие размеры, что позволяет применять их при измерениях в малых зазорах. С их помощью определяют параметры постоянных, переменных и импульсных полей.
Пределы измерения обычного прибора от 2*10-3 до 2 Тл, с относительной погрешностью ±1,5–2,5%.
 Вторым видом приборов для определения характеристик МП является ферромодуляционный тесламетр (ФМТ). Используют ФМТ для измерения слабых и средних, постоянных и переменных (до 1кГц) МП.
Вторым видом приборов для определения характеристик МП является ферромодуляционный тесламетр (ФМТ). Используют ФМТ для измерения слабых и средних, постоянных и переменных (до 1кГц) МП.
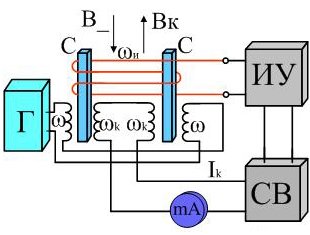
В основу работы ФМТ заложено свойство пермаллоевых сердечников С, изменять свое магнитное состояние, при одновременном воздействии на них постоянного и переменного МП.
Наиболее широкое применение в схеме измерения рис.2 нашли дифференциальные ферромодуляционные преобразователи. Генератор Г служит для создания переменного МП, которое посредствам катушек ω влияет на сердечники С.
В связи с тем, что эти катушки включены встречно, т. е. конец одной совпадает с другой, ЭДС в цепи индикаторной катушки ωи отсутствует.
Если внести сердечники С в постоянное МП (измеряемое поле), так чтобы вектор магнитной индукции был параллелен оси сердечников, в измерительной обмотке появится ЭДС. Это явление происходит благодаря физическим свойствам пермаллоя, изменять свое магнитное состояние под воздействием двух разнородных полей.
Итак, под влиянием поля В_ , на входе избирательного усилителя ИУ, на ряду с нечетными гармониками, появятся четные. В частности ЭДС второй гармоники имеет прямую зависимость от напряженности МП Н и магнитной индукции В_.
Е2 ≈ kH; E2 ≈ k1B.
где k и k1 – коэффициенты, учитывающие конструкционные особенности сердечников, частоту и напряженность поля возбуждения ω; Н – измеряемая напряженность МП; В_ — измеряемая индукция.
Синхронный выпрямитель получает с выхода ИУ усиленный сигнал ЭДС второй гармоники, преобразует ЭДС в пропорциональный ей (а значит и Н и В_) ток компенсации Iк.
Ток компенсации, протекая по компенсирующим обмоткам ωк, создает компенсирующее поле Вк, которое стремится уравновеситься с В_, и имеет встречное направление. Миллиамперметр, по которому также протекает ток Iк, градуирован в теслах.
Ферромодуляционные тесламетры имеют высокую чувствительность, точность, и могут быть использованы для непрерывных измерений параметров магнитного поля. Пределы измерения ФМТ от 10-6 до 1 мТл, с погрешностью от 1 до 5%.
 Тесламетры с квантовыми магнитоизмерительными преобразователями используют для измерения средних и слабых МП, постоянных и переменных частотой до 20 кГц полей. Принцип действия квантовых магнитоизмерительных преобразователей заключается во взаимодействии ядер молекул вещества с МП.
Тесламетры с квантовыми магнитоизмерительными преобразователями используют для измерения средних и слабых МП, постоянных и переменных частотой до 20 кГц полей. Принцип действия квантовых магнитоизмерительных преобразователей заключается во взаимодействии ядер молекул вещества с МП.
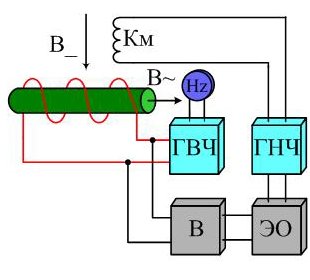
На рис.3 представлена схема распространенного ядерно-резонансного преобразователя. В колбе находится рабочее вещество. По средствам генератора высокой частоты ГВЧ и катушки, охватывающей витками колбу, к рабочему веществу приложено переменное МП.
Взаимодействие ядер с МП называется прецессией. Итак, в колбе частицы прецессируют вокруг вектора магнитной индукции переменного поля.
Под прямым углом, на колбу с рабочим веществом, начинает действовать измеряемое постоянное МП В_. Плавно изменяя частоту переменного поля, добиваются ядерного магнитного резонанса – совпадения частоты прецессии с частотой переменного поля. Резонанс заключается в увеличении амплитуды прецессии.
Этот процесс сопровождается поглощением части энергии переменного ВЧ поля, что приводит к изменению добротности катушки, а соответственно и изменению напряжения на ее концах.
Явление резонанса можно наблюдать на экране электронного осциллографа ЭО, на горизонтальный вход которого подается напряжение ГНЧ, а на вертикальный – выпрямленное напряжение рабочей катушки. ГНЧ питает током низкой частоты катушку модуляции Км, которая служит для модуляции магнитной индукции В_.
Ядерно-резонансные тесламетры являются самыми точными, их относительная погрешность составляет 0,001–0,1%, в области значений 10-2–10 Тл.
Собираем переносной магнитометр

Магнитометр, который иногда ещё называют гауссометром, измеряет силу магнитного поля [в данном случае магнитную индукцию / прим. перев.]. Это прибор, необходимый при измерении силы постоянных магнитов и электромагнитов, а также для установления формы поля нетривиальных комбинаций из магнитов. Он достаточно чувствительный для того, чтобы определить намагниченность металлических предметов. В случае, если зонд будет работать достаточно быстро, он сможет определять изменяющиеся во времени поля от моторов и трансформаторов.
В мобильных телефонах обычно есть трёхосевой магнитометр, однако он оптимизирован для слабого магнитного поля Земли силой в 1 Гаусс = 0,1 мТл [миллитесла] и насыщается в полях с индукцией в несколько мТл. Где именно в телефоне расположен этот датчик, обычно непонятно, и расположить его внутри узкого места типа разреза магнита часто невозможно. Более того, лучше вообще не подносить смартфон к сильным магнитам.
В данной статье я опишу, как сделать простейший переносной магнитометр из распространённых комплектующих: нам потребуются линейный датчик Холла, Arduino, дисплей и кнопка. Общая стоимость прибора не выходит за пределы €5, а измерять он будет индукцию от -100 до +100 мТл с погрешностью в 0,01 мТл – гораздо лучше, чем можно было ожидать. Для получения точных абсолютных показателей его понадобится откалибровать: я опишу, как это делается при помощи длинного самодельного соленоида.
Шаг 1: датчик Холла
Эффект Холла часто применяется для измерения магнитных полей. Когда электроны проходят через проводник, помещённый в магнитное поле, их относит в сторону, в результате чего в проводнике появляется поперечная разность потенциалов. Правильно выбрав материал и геометрию полупроводника, можно получить измеряемый сигнал, который затем можно будет усилить и выдать измерение одной компоненты магнитного поля.
Я использую SS49E, поскольку он дешёвый и доступный. Что стоит отметить из его документации:
- Питание: 2.7 — 6.5 В, что прекрасно совместимо с 5 В для Arduino.
- Нулевой сигнал: 2.25-2.75 В, примерно посередине между 0 и 5 В.
- Чувствительность: 1.0-1.75 мВ/Гс, поэтому для получения точных результатов потребуется калибровка.
- Выходное напряжение: 1,0 – 4,0 В (при работе от 5 В): диапазон покрывается АЦП Arduino.
- Диапазон: минимум ± 650 Гс, обычно +/1 1000 Гс.
- Время отклика: 3 мкс, то есть можно проводить измерения с частотой в десятки кГц.
- Рабочий ток: 6-10 мА, достаточно немного для батарейки.
- Температурная ошибка: 0,1% на градус Цельсия. Вроде немного, однако отклонение на 0,1% даёт ошибку в 3 мТл.
Шаг 2: Требуемые материалы
- Линейный датчик Холла SS49E. €1 за 10 штук.
- Arduino Uno с доской для прототипирования или Arduino Nano без штырьков для портативного варианта.
- Монохромный OLED дисплей SSD1306 0.96” с интерфейсом I2C.
- Кнопка.
- Шариковая ручка или другая прочная трубка.
- 3 тонких провода чуть длиннее трубки.
- 12 см термоусадки диаметром 1,5 мм.
- Большая коробка Tic-Tac (18x46x83) или нечто похожее.
- Контакты для батарейки на 9 В.
- Выключатель.
Шаг 3: Первая версия – с использованием доски для прототипирования
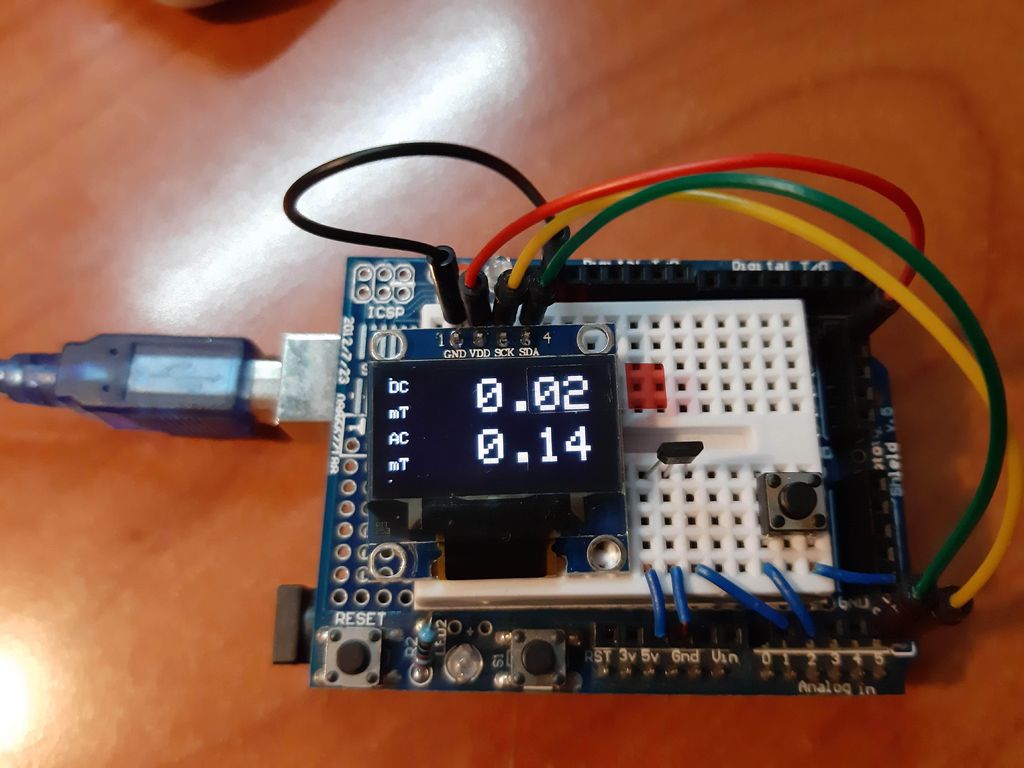
Сначала всегда собирайте прототип, чтобы проверить работу всех компонентов и софта! Подключение видно на картинке: датчик Холла соединяется с контактами Arduino +5V, GND, A1 (слева направо). Дисплей соединяется с GND, +5V, A5, A4 (слева направо). Кнопка при нажатии должна замыкать землю и A0.
Код написан в Arduino IDE v. 1.8.10. Требуется установка библиотек Adafruit_SSD1306 и Adafruit_GFX.
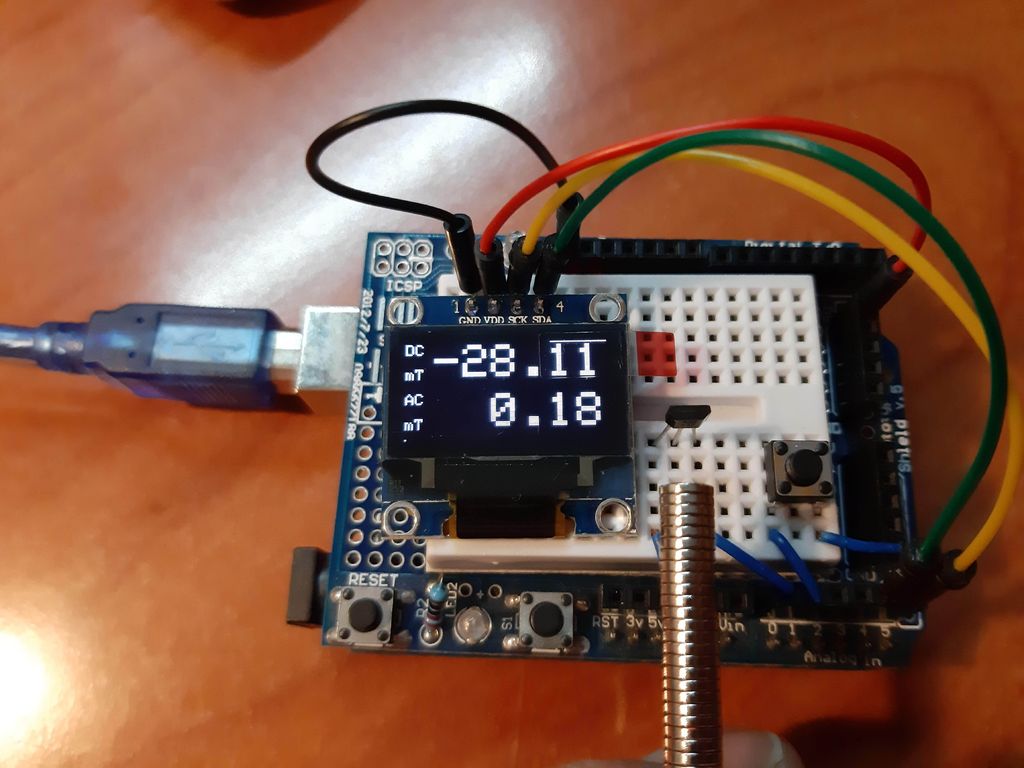
Если всё сделано правильно, то дисплей должен выдавать значения DC и AC.
Шаг 4: Немного о коде
Если вам неинтересен код, эту часть можно пропустить.
Ключевая особенность кода состоит в том, что магнитное поле измеряется 2000 раз подряд. На это уходит 0,2 – 0,3 сек. Отслеживая сумму и квадрат суммы измерений, можно вычислять среднее и стандартное отклонения, которые выдаются как DC и AC. Усредняя по большому количеству измерений мы увеличиваем точность, теоретически на √2000 ≈ 45. Получается, что используя 10-битное АЦП, мы получаем точность 15-битного АЦП! И это имеет значение: 1 шаг АЦП – 4 мВ, то есть,
0,3 мТл. Благодаря усреднению, мы уменьшаем ошибку от 0,3 мТл до 0,01 мТл.
В качестве бонуса мы получаем стандартное отклонение, определяя таким образом изменяющееся поле. Поле, колеблющееся с частотой 50 Гц проходит порядка 10 циклов за время измерения, поэтому можно измерить величину AC.
У меня после компиляции получилась следующая статистика: Sketch uses 16852 bytes (54%) of program storage space. Maximum is 30720 bytes. Global variables use 352 bytes (17%) of dynamic memory, leaving 1696 bytes for local variables. Maximum is 2048 bytes.
Большую часть места занимают библиотеки Adafruit, однако ещё полно места для добавления функциональности.
Шаг 5: Готовим зонд
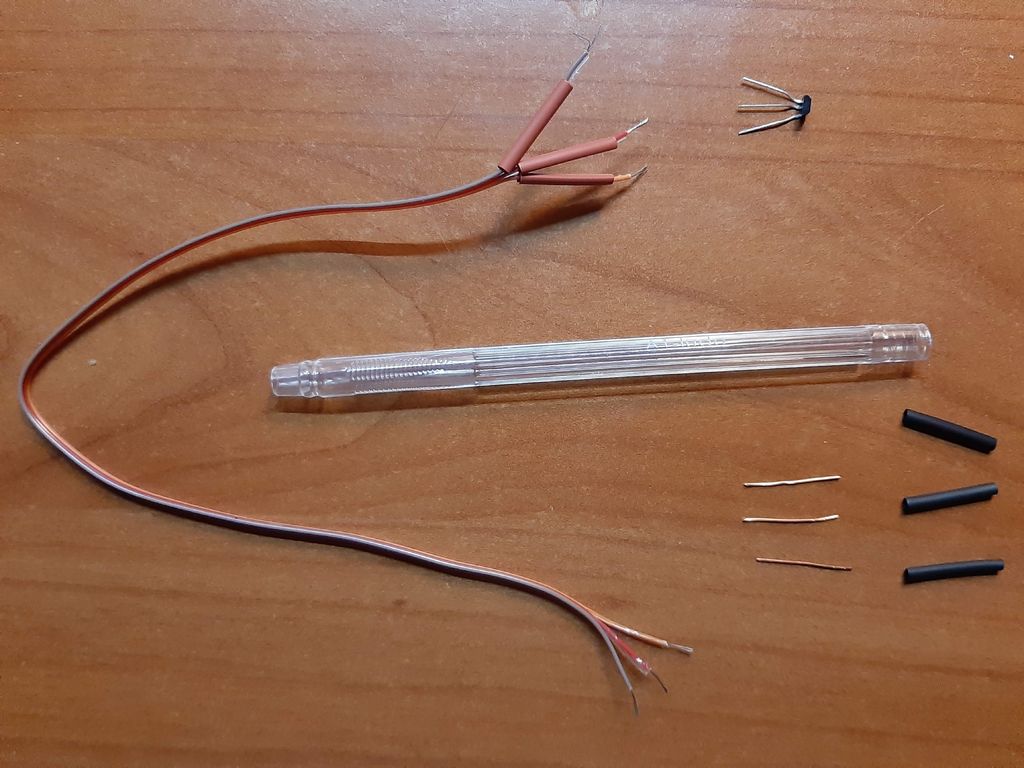

Зонд лучше всего закреплять на конце узкой трубки: так его просто будет помещать и удерживать в узких местах. Подойдёт любая трубка из немагнитного материала. Мне идеально подошла старая шариковая ручка.
Подготовьте три тонких гибких провода чуть длиннее трубки. В моём кабеле логики в цветах проводов нет (оранжевый +5 В, красный 0 В, серый – сигнал), просто так мне их проще запомнить.
Чтобы использовать зонд с прототипом, припаяйте кусочки проводов на конец кабеля и заизолируйте их термоусадкой. Позже их можно отрезать и припаять провода прямо к Arduino.
Шаг 6: Собираем переносной прибор

Батарейка на 9В, OLED-экран и Arduino Nano с комфортом умещаются внутри большой коробки Tic-Tac. Её преимущество в прозрачности – экран легко читается, даже находясь внутри. Все фиксированные компоненты (зонд, выключатель и кнопка) ставятся на крышку, чтобы всё можно было вынимать из коробки для замены батареи или обновления кода.
Я никогда не любил батарейки на 9В – у них высокая цена и малая ёмкость. Но в моём супермаркете внезапно стали продавать их перезаряжаемую версию NiMH по €1, и я обнаружил, что их легко зарядить, если подать 11 В через резистор на 100 Ом и оставить на ночь. Я заказал себе дешёвые разъёмы для батареек, но мне их так и не прислали, поэтому я разобрал старую батарейку на 9 В, чтобы сделать из неё коннектор. Плюс батарейки на 9В в её компактности, и в том, что на ней хорошо работает Arduino при подключении её к Vin. На +5 В будет регулируемое напряжение в 5 В, которое понадобится для OLED и датчика Холла.
Датчик Холла, экран и кнопка подсоединяются так же, как было на прототипе. Добавляется только кнопка выключения, между батарейкой и Arduino.
Шаг 7: Калибровка


Калибровочная константа в коде соответствует числу, прописанному в документации (1,4 мВ/Гс), однако в документации разрешён диапазон этого значения (1.0-1.75 мВ/Гс). Чтобы получать точные результаты, нужно откалибровать зонд.
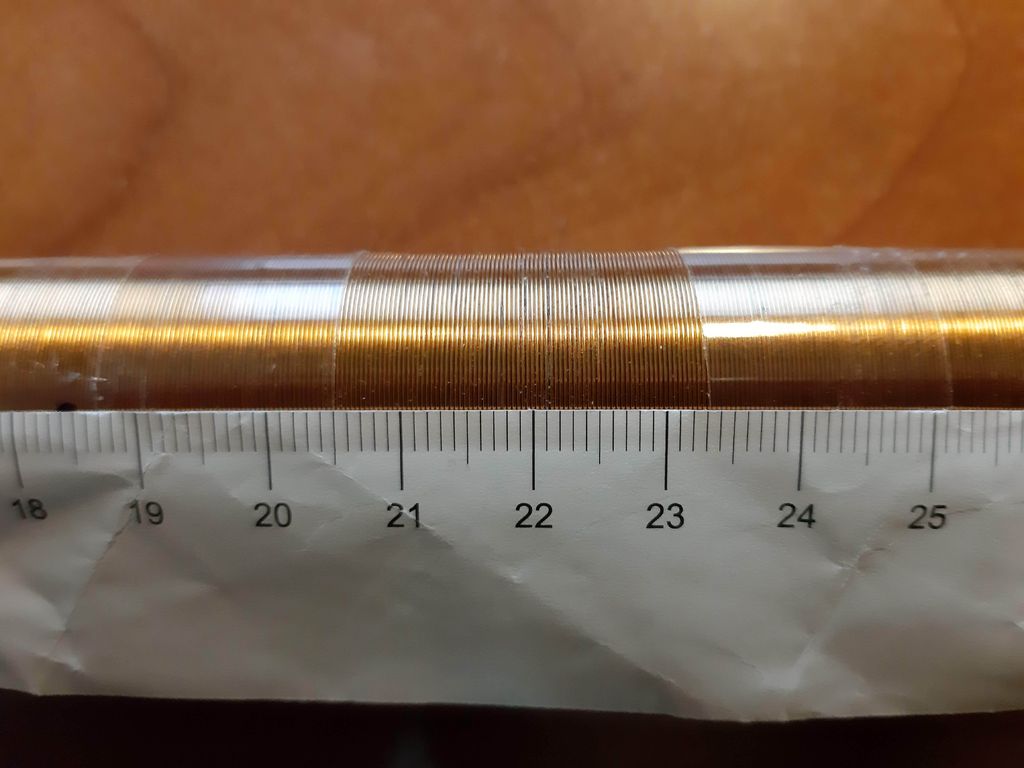
Самый простой способ получить магнитное поле хорошо определённой силы – использовать соленоид. Магнитная индукция поля соленоида равняется B = μ * n * I. Магнитная постоянная (или магнитная проницаемость вакуума) – это природная константа: μ = 1,2566 x 10 -6 Тл/м/А. Поле однородно и зависит только от плотности намотки n и тока I, которые можно измерить с погрешностью около 1%. Формула работает для соленоида бесконечной длины, однако служит очень хорошим приближением для поля в его центре, если соотношение его длины к диаметру превышает 10.
Чтобы собрать подходящий соленоид, возьмите полую цилиндрическую трубу, длина которой в 10 раз больше диаметра, и сделайте намотку из изолированного провода. Я использовал ПВХ-трубку с внешним диаметром 23 мм и сделал 566 витков, протянувшихся на 20,2 см, что даёт нам n = 28/см = 2800 / м. Длина провода 42 м, сопротивление – 10 Ом.
Подайте питание на катушку и измерьте ток мультиметром. Используйте либо регулируемый источник тока, либо переменный резистор, чтобы управлять током. Измерьте магнитное поле для разных значений тока и сравните показания.
Перед калибровкой я получил 6,04 мТл/A, хотя по теории должно было быть 3,50 мТл/A. Поэтому я умножил константу калибровки в 18-й строчке кода на 0,58. Готово – магнитометр откалиброван!




