Конструкция и принцип действия
Синхронный компенсатор (СК) представляет собой синхронную машину облегчённой конструкции, предназначенный для работы на холостом ходу, работающий в режиме двигателя без активной нагрузки и генерирующий в сеть реактивный опережающий (емкостный) или отстающий (индуктивный) ток. При работе в режиме перевозбуждения СК является генератором реактивной мощности. Наибольшая мощность СК в режиме перевозбуждения называется его номинальной мощностью. При работе в режиме недовозбуждения СК является потребителем реактивной мощности. По конструктивным условиям СК обычно не может потреблять из сети такую же реактивную мощность, которую он может генерировать. Изменение тока возбуждения СК обычно автоматизируется. При работе СК из сети потребляется активная мощность порядка 2-4%.
-Синхронные компенсаторы применяют для регулирования режимов работы энергетических систем, для поддержания оптимального уровня напряжения, снижения потерь электроэнергии в сетях, увеличения пропускной способности и обеспечения устойчивости энергосистем.
Синхронные компенсаторы являются генераторами и потребителями реактивной мощности. Они включаются в систему вблизи мощных узлов нагрузки.
Синхронные компенсаторы позволяют разгружать линии электропередачи от реактивных токов, повышая их использование и поддерживая заданный уровень напряжения в системе. Последнее имеет важное значение не только в отношении качества электроэнергии у потребителей, но и с точки зрения повышения устойчивости работы энергосистемы.
Важным свойством синхронного компенсатора является его способность к стабилизации напряжения сети. При уменьшении напряжения сети реактивная мощность, отдаваемая компенсатором в сеть, увеличивается, а при увеличении напряжения компенсатор переходит в режим потребления реактивной мощности. Благодаря такой реакции компенсатора происходит стабилизация реактивного тока в линии электропередачи и, следовательно, стабилизация напряжения.
Статические конденсаторы получили на промышленных предприятиях наибольшее распространение как средство компенсации реактивной мощности.
Основными достоинствами статических конденсаторов для компенсации реактивной мощности являются:
1) незначительные потери активной мощности, лежащие в пределах 0,3-0,45 кВт на 100 квар;
2) отсутствие вращающихся частей и сравнительно малая масса установки с конденсаторами, а в связи с этим отсутствие необходимости в фундаменте;
3) возможность увеличения или уменьшения установленной мощности в зависимости от потребности;
4) возможность установки статических конденсаторов в любой точке сети: у отдельных электроприемников, группами в цехах или крупными батареями.
Кроме того, выход из строя отдельного конденсатора, при надлежащей его защите, не отражается обычно на работе всей конденсаторной установки.
Основными элементами конструкции конденсаторов являются бак с изоляторами и выемная часть, состоящая из батареи секций простейших конденсаторов.
Конденсаторы единой серии напряжением до 1050 В включительно изготавливают со встроенными плавкими предохранителями, последовательно соединенными с каждой секцией. Конденсаторы более высокого напряжения не имеют встроенных плавких предохранителей и требуют отдельной их установки. В этом случае осуществляется групповая зашита конденсаторов плавкими предохранителями. При выполнении групповой защиты в виде плавких предохранителей один предохранитель защищает каждые 5—10 конденсаторов, причем номинальный ток группы не превышает 100 А. Кроме того, устанавливаются общие предохранители для всей батареи.
Для конденсаторов напряжением 1050 В и ниже, имеющих встроенные предохранители, устанавливаются также общие предохранители для батареи в целом, а при значительной мощности батареи — и для отдельных секций.
В зависимости от напряжения сети трехфазные батареи конденсаторов могут комплектоваться из однофазных конденсаторов с последовательным или параллельно — последовательным соединением конденсаторов в каждой фазе батареи.
Присоединение конденсаторных батарей к сети
Батареи конденсаторов любых напряжений могут присоединяться к сети или через отдельный аппарат, предназначенный для включения или отключения только конденсаторов, или через общий аппарат управления с силовым трансформатором, асинхронным двигателем или другим приемником электроэнергии.
Статические конденсаторы в установках напряжением до 1000 В включаются в сеть и отключаются от сети с помощью автоматических выключателей или рубильников.
Назначение, конструкция, принцип действия и область применения вентильных разрядников, достоинства и недостатки.
Вентильные разрядники, как и другие типы разрядников, предназначены для ограничения возникающих в электрических сетях коммутационных и атмосферных перенапряжений, с целью предотвращения возможных пробоев изоляции, повреждения оборудования и прочих негативных последствий.
Конструкция и принцип действия
Вентильный разрядник состоит из двух основных компонентов: многократного искрового промежутка (состоящего из нескольких однократных) и рабочего резистора (состоящего из последовательного набора вилитовых дисков). Многократный искровой промежуток последовательно соединен с рабочим резистором. В связи с тем, что вилит меняет характеристики при увлажнении, рабочий резистор герметично закрывается от внешней среды. Во время перенапряжения многократный искровой промежуток пробивается, задача рабочего резистора — снизить значение сопровождающего тока до величины, которая сможет быть успешно погашена искровыми промежутками. Вентиль обладает особенным свойством — его сопротивление нелинейно — оно падает с увеличением значения силы тока. Это свойство позволяет пропустить больший ток при меньшем падении напряжения. Благодаря этому свойству вентильные разрядники и получили свое название. Среди прочих преимуществ вентильных разрядников следует отметить бесшумность срабатывания и отсутствие выбросов газа или пламени.
Разрядник типа РВС-10 (разрядник вентильный станционный на 10 кВ) показан на рисунке. Основными элементами являются вилитовые кольца 1, искровые промежутки 2 и рабочие резисторы 3. Эти элементы расположены внутри фарфорового кожуха 4, который с торцов имеет специальные фланцы 5 для крепления и присоединения разрядника. Рабочие резисторы 3 изменяют свои характеристики при наличии влаги. Кроме того, влага, оседая на стенках и деталях внутри разрядника, ухудшает его изоляцию и создает возможность перекрытия. Для исключения проникновения влаги кожух разрядника герметизируется по торцам с помощью пластин 6 и уплотнительных резиновых прокладок 7.
Работа разрядника происходит в следующем порядке.
При появлении перенапряжения пробиваются три последовательно включенных блока искровых промежутков 2. Импульс тока при этом через рабочие резисторы замыкается на землю. Возникший сопровождающий ток ограничивается рабочими резисторами, которые создают условия для гашения дуги сопровождающего тока.

Рис. 1. Электрическая схема включения вентильных разрядников. ИП — искровой промежуток, Rн — сопротивление нелинейного последовательного резистора, U — импульс грозового перенапряжения, И — изоляция защищаемого объекта.
Следует отметить, что в схеме вентильного разрядника важное значение имеет заземляющее устройство. При отсутствии заземления разрядник работать не может.
Достоинствами ОПН, по сравнению с вентильными разрядниками, являются взрывобезопасность, более высокая надежность, снижение уровня перенапряжений, воздействующих на защищаемое оборудование, и возможность контроля старения сопротивлений по току в рабочем режиме. Существенным недостатком ОПН и вентильных разрядников является невозможность обеспечения с их помощью защиты от квазистационарных перенапряжений (резонансные и феррорезонансные перенапряжения, смещение нейтрали при перемежающейся электрической дуге). Не следует забывать, что при длительных перенапряжениях происходит интенсивное старение ОПН, и они могут отказать, т. е. повредиться.
Одним из основных недостатков вентильных разрядников является высокое значение коэффициента нелинейности материалов (тервита и вилита) a = (0,2—0,4), а также нестабильность напряжений пробоя.
Конструкция и принцип действия
Несмотря на большое разнообразие моделей винчестеров принцип их действия и основные конструктивные элементы одинаковы. На рисунке 5 показаны основные элементы конструкции накопителя на жестком диске:
· магнитные диски;
· головки чтения/записи;
· механизм привода головок;
· двигатель привода дисков;
· печатная плата с электронной схемой управления.
Типовой накопитель состоит из герметичного корпуса (гермоблока) и платы электронного блока. В гермоблоке размещены все механические части, на плате — вся управляющая электроника. Внутри гермоблока установлен шпиндель с одним или несколькими магнитными дисками. Под ними расположен двигатель. Ближе к разъемам, с левой или правой стороны от шпинделя находится поворотный позиционер магнитных головок. Позиционер соединен с печатной платой гибким ленточным кабелем (иногда одножильными проводами).
Гермоблок заполняется воздухом под давлением в одну атмосферу. В крышках гермоблоков некоторых винчестеров имеется специальное отверстие, заклеенное фильтрующей пленкой, которое служит для выравнивания давления внутри блока и снаружи, а также для поглощения пыли.

Рисунок 5 — Основные элементы конструкции накопителя на жестких дисках
Габаритные размеры винчестеров стандартизованы по параметру, называемому формфактор (Form-Factor). Например, все HDD с формфактором 3,5″ имеют стандартные размеры корпуса 41,6x101x146 мм.
Подложки магнитных дисков первых винчестеров изготовлялись из алюминиевого сплава с добавлением магния. В современных моделях в качестве основного материала для дисковых пластин используется композиционный материал из стекла и керамики с малым температурным коэффициентом расширения, что делает их менее восприимчивыми к изменениям температуры, более прочными. Магнитные диски выпускаются следующих размеров: 3,5″; 5,25″; 2,5″; 1,8″.
Диски покрываются магнитным веществом — рабочим слоем. Он может быть либо оксидный, либо на основе тонких пленок.
Головки чтения/записи предусмотрены для каждой стороны диска. Когда накопитель выключен, головки касаются диска. При раскручивании дисков возрастает аэродинамическое давление воздуха на головки, что приводит к их отрыву от рабочих поверхностей дисков. Чем ближе располагается головка к поверхности диска, тем выше амплитуда воспроизводимого сигнала.
Механизм привода головок обеспечивает перемещение головок от центра дисков к краям и фактически определяет надежность накопителя, его температурную стабильность и вибрационную устойчивость. Все существующие механизмы привода головок делятся на два основных типа: с шаговым двигателем и подвижной катушкой.
Двигатель привода дисков приводит пакет дисков во вращение, скорость которого в зависимости от модели находится в пределах 3600 — 7200 об/мин (т.е. головки движутся с относительной скоростью 60 — 80 км/ч). Скорость вращения дисков некоторых винчестеров достигает 15 000 об/мин. Жесткий диск вращается непрерывно даже тогда, когда не происходит обращения к нему, поэтому винчестер должен быть установлен только вертикально или горизонтально.
Печатная плата с электронной схемой управления и прочие узлы накопителя (лицевая панель, элементы конфигурации и монтажные детали) являются съемными. На печатной плате монтируются электронные схемы управления двигателем и приводом головок, схема для обмена данными с контроллером. Иногда контроллер устанавливается непосредственно на этой плате.
Вопросы для самоконтроля:
1. Накопители на гибких дисках. Конструкция, принцип действия, основные компоненты, технические характеристики FDD;
2. Логическая структура дискет;
3. Накопители на жестких магнитных дисках. Конструкция и принцип работы HDD, форм-факторы, типы;
4. Основные характеристики и режимы работы накопителей на жестких магнитных дисках. Контроллеры и подключение HDD;
Конструкция и принцип действия …
Воропаев Е.Г.
Электротехника
Если в рассмотренных выше асинхронных машинах ротор имел частоту вращения, отличную от частоты вращения магнитного поля статора, то в синхронных эти частоты равны между собой.
Синхронные машины могут работать как генераторами, так и двигателями.
В зависимости от типа привода синхронные генераторы получили и свои названия.
Турбогенератор, например, — это генератор, приводимый в движение паровой турбиной, гидрогенератор вращает водяное колесо, а дизель — генератор механически связан с двигателем внутреннего сгорания.
Синхронные двигатели широко применяют для привода мощных компрессоров, насосов, вентиляторов.
Синхронные микродвигатели используют для привода лентопротяжных механизмов регистрирующих приборов, магнитофонов и т.д.
6.1. КОНСТРУКЦИЯ И ПРИНЦИП ДЕЙСТВИЯ СИНХРОННОГО ГЕНЕРАТОРА
Статор синхронной машины по конструкции не отличается от статора асинхронного двигателя. В пазах статора размещается трехфазная, двухфазная или однофазная обмотки.
Заметное отличие имеет ротор, который принципиально представляет собой постоянный магнит или электромагнит.
Это налагает особые требования на геометрическую форму ротора. Любой магнит имеет полюса, число которых может быть два и более.
На рис. 6.1.1 приведены две конструкции генераторов, с тихоходным и быстроходным ротором.
Быстроходными бывают, как правило, турбогенераторы. Количество пар магнитных полюсов у них равно единице. Чтобы такой генератор вырабатывал электрический ток стандартной частоты f = 50 Гц, его необходимо вращать с частотой
На гидроэлектростанциях вращение ротора зависит от движения водяного потока. Но и при медленном вращении такой генератор должен вырабатывать электрический ток стандартной частоты f = 50 Гц.
Поэтому для каждой гидроэлектростанции конструируется свой генератор, на определенное число магнитных полюсов на роторе.
В качестве примера приведем параметры синхронного генератора, работающего на Днепровской ГЭС.
Водяной поток вращает ротор генератора с частотой n = 33,3 об / мин. Задавшись частотой f = 50 Гц, определим число пар полюсов на роторе:
Принцип действия синхронного генератора основан на явлении электромагнитной индукции. Ротор с магнитными полюсами создает вращающееся магнитное поле, кото-рое, пересекая обмотку статора, наводит в ней ЭДС. При подключении к генератору нагрузки генератор будет являться источником переменного тока.
6.2. ЭДС СИНХРОННОГО ГЕНЕРАТОРА
Как было показано выше, величина наводимой в обмотке статора ЭДС количественно связана с числом витков обмотки и скорости изменения магнитного потока:
Переходя к действующим значениям, выражение ЭДС можно записать в виде:
где n — частота вращения ротора генератора,
Ф — магнитный поток,
c — постоянный коэффициент.
При подключении нагрузки напряжение на зажимах генератора в разной степени меняется. Так, увеличение активной нагрузки не оказывает заметного влияния на напряжение. В то же время индуктивная и емкостная нагрузки влияют на выходное на-пряжение генератора. В первом случае рост нагрузки размагничивает генератор и снижает напряжение, во втором происходит его подмагничивание и повышение напряжения. Такое явление называется реакцией якоря.
Для обеспечения стабильности выходного напряжения генератора необходимо регулировать магнитный поток. При его ослаблении машину надо подмагнитить, при увеличении — размагнитить. Делается это путем регулирования тока, подаваемого в обмотку возбуждения ротора генератора.
6.3. СИНХРОННЫЙ ДВИГАТЕЛЬ
6.3.1. КОНСТРУКЦИЯ И ПРИНЦИП ДЕЙСТВИЯ
Конструкция синхронного двигателя такая же, как и у синхронного генератора.
При подаче тока в трехфазную обмотку статора в нем возникает вращающееся магнитное поле. Частота вращения его определяется формулой:
где f — частота тока питающей сети,
р — число пар полюсов на статоре.
Ротор, являющийся часто электромагнитом, будет строго следовать за вращаю-щимся магнитным полем, т.е. его частота вращения n2 = n1.
Рассмотрим принцип действия синхронного двигателя на следующей условной модели (рис. 6.3.1.). Пусть магнитное поле статора будет смоделировано системой вращающихся магнитных полюсов N — S.
Ротор двигателя тоже представляет собой систему электромагнитов S — N, кото-рые «сцеплены» с полюсами на статоре. Если нагрузка на двигателе отсутствует, то оси полюсов статора будут совпадать с осями полюсов ротора ( = 0).
Если же к ротору подключена механическая нагрузка, то оси полюсов статора и ротора могут расходиться на некоторый угол .
Однако «магнитное сцепление» ротора со статором будет продолжаться, и частота вращения ротора будет равна синхронной частоте статора (n2 = n1). При больших значениях ротор может выйти из «сцепления» и двигатель остановится.
Главное преимущество синхронного двигателя перед асинхронным — это обеспечение синхронной скорости вращения ротора при значительных колебаниях нагрузки.
6.3.2. СИСТЕМА ПУСКА СИНХРОННОГО ДВИГАТЕЛЯ
Как мы показали выше, синхронное вращение ротора обеспечивается «магнитным сцеплением» полюсов ротора с вращающимся магнитным полем статора.
В первый момент пуска двигателя вращающееся магнитное поле статора возникает практически мгновенно. Ротор же, обладая значительной инерционной массой, прийти в синхронное вращение сразу не сможет. Его надо «разогнать» до подсинхронной скорости каким-то дополнительным устройством.
Долгое время роль разгонного двигателя играл обычный асинхронный двигатель, механически соединенный с синхронным.
Ротор синхронного двигателя приводится во вращение до подсинхронной скорости. Далее двигатель сам втягивается в синхронизм.
Обычно мощность пускового двигателя составляет 5-15 % от мощности синхронного двигателя. Это позволяет пускать в ход синхронный двигатель только вхолостую или при малой нагрузке на валу.
Применение пускового двигателя мощностью, достаточной для пуска синхронного двигателя под нагрузкой делает такую установку громоздкой и дорогой.
В последнее время используется так называемая система асинхронного пуска синхронных двигателей. С этой целью в полюсные наконечники забивают стержни, напоминающие собою короткозамкнутую обмотку асинхронного двигателя (рис. 6.3.2.1).
В начальный период пуска синхронный двигатель работает как асинхронный, а в последующем — как синхронный. В целях безопасности обмотку возбуждения в начальном периоде пуска закорачивают, а на заключительном подключают к источнику по-стоянного тока.
6.4. РЕАКТИВНЫЙ СИНХРОННЫЙ ДВИГАТЕЛЬ
В лабораторной практике, в быту и в маломощных механизмах применяют так называемые реактивные синхронные двигатели.
От обычных классических машин они отличаются лишь конструкцией ротора. Ротор здесь не является магнитом или электромагнитом, хотя по форме напоминает собой полюсную систему.
Принцип действия реактивного синхронного двигателя отличен от рассмотренного выше. Здесь работа двигателя основана, на свободной ориентации ротора таким образом, чтобы обеспечить магнитному потоку статора лучшую магнитную проводимость (рис. 6.4.1).
Действительно, если в какой-то момент времени максимальный магнитный поток будет в фазе А — X, то ротор займет положение вдоль потока ФА. Через 1/3 периода максимальным будет поток в фазе В — У. Тогда ротор развернется вдоль потока ФВ. Еще через 1/3 периода произойдет ориентация ротора вдоль потока. ФС. Так непрерывно и синхронно ротор будет вращаться с вращающимся магнитным полем статора.
В школьной практике иногда, при отсутствии специальных синхронных двигателей, возникает необходимость в синхронной передаче.
Эту проблему можно решить с помощью обычного асинхронного двигателя, если придать ротору следующую геометрическую форму (рис. 6.4.2).
6.5. ШАГОВЫЙ ДВИГАТЕЛЬ
Этот тип двигателя является машиной постоянного тока, хотя принцип действия его напоминает синхронный реактивный двигатель.
Как видно из рис. 6.5.1, статор двигателя имеет шесть пар выступающих полюсов.
Каждые две катушки, расположенные на противоположных полюсах статора, образуют обмотку управления, включаемую, в сеть постоянного тока. Ротор — двухполюсный.
Если подключить к источнику постоянного тока катушки полюсов 1 — 1′, то ротор расположится вдоль этих полюсов. Если задействовать катушки полюсов 2 — 2′, а ка-тушки полюсов 1 — 1′ обесточить, то ротор повернется и займет положение вдоль полю-сов 2 — 2′. Такой же поворот ротора произойдет, если включить в сеть катушки полюсов 3 — 3′. Так, шагами, ротор будет «следовать» за своей обмоткой управления.
Преимуществом шаговых двигателей является то, что в них совершенно отсутствует «самоход». Они поворачиваются и строго фиксируются с шагом, пропорциональ-ным числу полюсов на статоре. Это качество делает его незаменимым в особо точных механизмах (для привода часов, механизмов подачи ядерного топлива в реакторах, в станках с ЧПУ и т.д.).
Управление шаговыми двигателями ведется с применением различных электронных устройств (триггеров Шмидта и др.).
6.6. КОЛЛЕКТОРНЫЙ ДВИГАТЕЛЬ ПЕРЕМЕННОГО ТОКА
Безколлекторные асинхронные и синхронные двигатели при многих положительных качествах имеют существенные недостатки. Они не допускают достаточно плавного и экономичного регулирования вращения.
Этот пробел частично восполняют коллекторные двигатели переменного тока.
Коллекторные двигатели бывают однофазными и трехфазными.
Ротор однофазного коллекторного двигателя выполнен в виде цилиндра с фазными обмотками, статор — явнополюсный.
Так как обмотка полюсов статора, подключаемая к сети переменного тока, создает пульсирующее магнитное поле, то все элементы магнитной цепи машины набираются из отдельных листов электротехнической стали.
Вращающий момент в однофазном коллекторном двигателе создается взаимодействием токов в обмотке ротора с магнитным потоком полюсов. На рис. 6.6.1- показана схема подключения к сети коллекторного двигателя.
Коллекторные двигатели могут работать как от сети переменного тока, так и от сети постоянного тока. Это обстоятельство послужило для присвоения им наименования универсальных коллекторных двигателей. Коллекторные двигатели широко при-меняются для привода швейных машин, пылесоса и т.д.
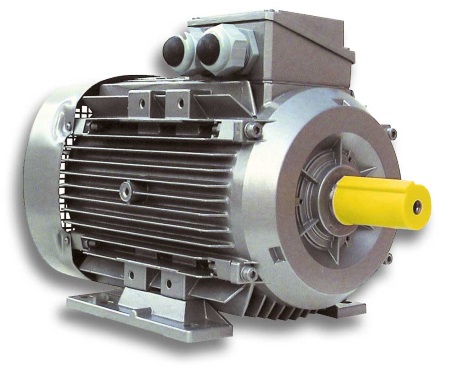
Устройство и принцип работы электродвигателя
Электродвигатель – устройство для преобразования электроэнергии во вращательное движение вращающейся части электрической машины. Преобразование энергии в двигателях происходит за счет взаимодействия магнитных полей обмоток статора и ротора. Эти электрические машины широко используются во всех отраслях промышленности, в качестве привода электротранспорта и инструментов, в системах автоматизации, бытовой техники и так далее.
Существует множество видов электродвигателей, различающихся по принципу действия, конструкции, исполнению и другим признакам. Рассмотрим основные типы этих электрических машин.
По принципу действия различают магнитоэлектрические и гистерезисные электрические машины. Несмотря на простоту конструкции, высокий пусковой момент, последние не получили широкого распространения. Эти электродвигатели имеют высокую цену, низкий коэффициент мощности, ограничивающие их применение. Подавляющее большинство выпускаемых электродвигателей – магнитоэлектрические.
По типу напряжения питания различают:
- Электродвигатели постоянного тока.
- Двигатели переменного тока.
- Универсальные электрические машины.
По конструкции различают электродвигатели с горизонтально и вертикально расположенным валом. Кроме того, электрические машины классифицируют по назначению, климатическому исполнению, степени защиты от попадания влаги и посторонних предметов, мощности и другим параметрам.
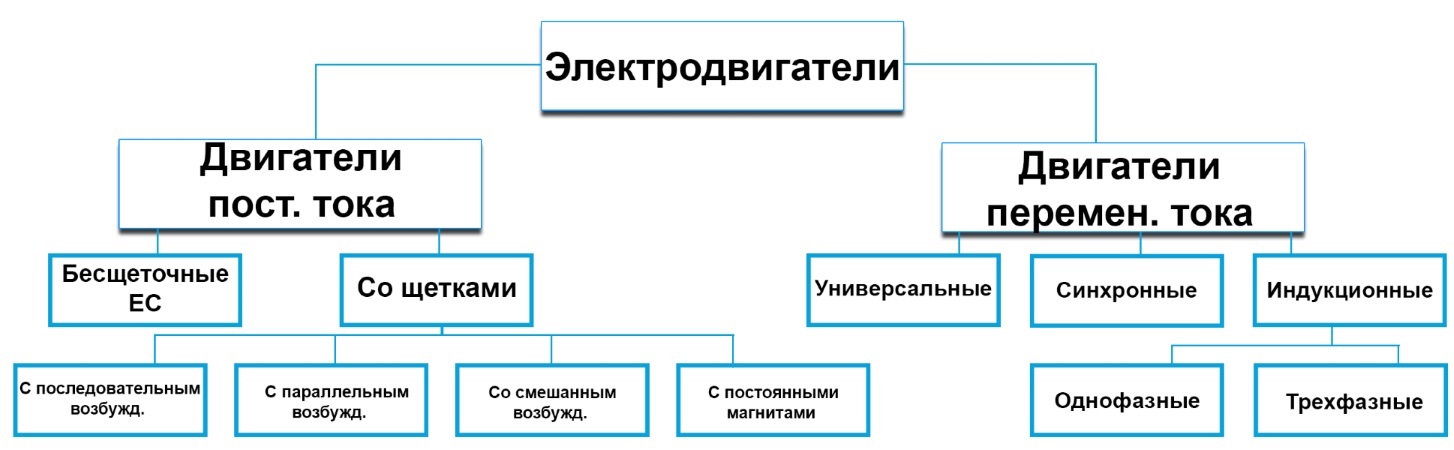
Классы электродвигателей:
- Постоянного тока
- Бесщеточные ЕС (электронно-коммутируемые)
- Со щетками
- С последовательным возбуждением
- С параллельным возбуждением
- Со смешанным возбуждением
- С постоянными магнитами
- Переменного тока
- Универсальные
- Синхронные
- Индукционные
- Однофазные
- Трехфазные
Таблица классификации электронных двигателей:

Электродвигатели постоянного тока
Двигатели постоянного тока широко применяются в качестве привода электротранспорта, промышленного оборудования, а также микропривода исполнительных механизмов. Такие электрические машины обладают следующими преимуществами:
- Возможность регулировки частоты вращения путем изменения напряжения в обмотке возбуждения. При этом крутящий момент на валу ДПТ (двигатели постоянного тока) остается неизменным.
- Высокий к.п.д. (коэффициент полезного действия) у машин постоянного тока несколько выше, чем у самых распространенных асинхронных двигателей переменного тока. При неполной нагрузке на валу к.п.д. ДПТ выше на 10-15%.
- Возможность изготовления ДПТ небольших габаритов. Практически все используемые микроприводы рассчитаны на постоянный ток.
- Простота схем управления. Для пуска, реверса и регулирования скорости и момента не требуется сложного электронного оборудования и большого количества аппаратов для коммутации.
- Возможность работы в режиме генератора. Электродвигатели такого типа можно использовать в качестве источников постоянного тока.
- Высокий пусковой момент. ДПТ используют в составе электроприводов кранов, тяговых и грузоподъемных механизмов, где требуется запуск под значительной нагрузкой.
ДПТ различают по способу возбуждения, они бывают:
- С постоянными магнитами. Такие двигатели отличаются малыми габаритами. Основная область их применения – микроприводы.
- С электромагнитным возбуждением.
Электрические машины с электромагнитами такого типа получили самое широкое распространение. Их классифицируют по способу подключения обмотки статора:
- Двигатели с параллельным возбуждением. Обмотки якоря и статора в электрической машине такого типа соединены параллельно. Такие электрические машины не требуют дополнительного источника питания для обмотки возбуждения, скорость вращения ротора практически не зависит от нагрузки. Их используют для привода металлорежущих станков и другого оборудования.
- Электродвигатели с последовательно включенной обмоткой статора. ДПТ этого типа имеют значительный пусковой момент. Их применяют в качестве привода электротранспорта и промышленных установок с необходимостью пуска под нагрузкой.
- Двигатели с независимым возбуждением. Для питания обмотки статора таких электромашин используется независимый источник постоянного тока. ДПТ такого типа отличаются широким диапазоном регулирования скоростей.
- Электрические машины со смешанным возбуждением. Электромагнит возбуждения в таких двигателях поделен на 2 части. Одна из них включена параллельно, вторая последовательно обмотке якоря. Электрические машины такого типа используются в механизмах и оборудовании, где необходим высокий пусковой момент, а также переменная и постоянная скорость при переменном моменте.
Электродвигатели переменного тока
Электрические машины такого типа широко используют для приводов всех типов технологического оборудования, электроинструментов, автоматических регуляторов. По наличию разности между скоростью вращения магнитного поля статора и частотой вращения ротора различают синхронные и асинхронные двигатели.
Асинхронные электродвигатели
Благодаря дешевизне и простоте конструкции электрические машины такого типа получили самое широкое распространение. Их принципиальное отличие – наличие так называемого скольжения. Это разность между частотой вращения магнитного поля неподвижной части электрической машины и скоростью вращение ротора. Напряжение на вращающейся части индуцируется за счет переменного магнитного поля обмоток статора двигателя. Вращение вызывает взаимодействие поля электромагнитов неподвижной части и магнитного поля ротора, возникающего под влиянием наведенных в нем вихревых токов. По особенностям обмоток статора выделяют:
- Однофазные двигатели переменного тока. Двигатели такого типа требуют для пуска наличия внешнего фазосдвигающего элемента. Это может быть пусковой конденсатор или индуктивное устройство. Область применения однофазных двигателей – маломощные приводы.
- Двухфазные электрические машины. Такие двигатели имеют 2 обмотки со смещенными относительно друг друга фазами. Их также используют для бытовых устройств и оборудования, имеющего небольшую мощность.
- Трех- и многофазные электродвигатели. Наиболее распространенный тип асинхронных машин. Электрические двигатели такого типа имеют от 3-х и более обмоток статора, сдвинутых по фазе на определенный угол.
По конструкции ротора асинхронные электрические машины делят на двигатели с короткозамкнутым и фазным ротором.
Обмотка ротора электрических машин первого типа представляет собой несколько неизолированных стержней, выполненных из сплавов меди или алюминия, замкнутых с двух сторон кольцами (конструкция “беличья клетка”). Асинхронные двигатели такого типа обладают следующими преимуществами:
- Достаточно простая схема пуска. Такие электрические машины можно подключать непосредственно к электрической сети через аппараты коммутации.
- Допустимость кратковременных перегрузок.
- Возможность изготавливать электрические машины высокой мощности. Двигатель такого типа не содержит скользящих контактов, препятствующих наращиванию мощности.
- Относительно простое ТО и ремонт. Асинхронные электромашины имеют несложную конструкцию.
- Невысокая цена. Двигатели асинхронного типа стоят дешевле синхронных машин и ДПТ.
Электрические машины с короткозамкнутым ротором имеют свои недостатки:
- Предельная скорость вращения составляет не более 3000 об/мин при входе в синхронный режим.
- Технически сложная реализация регулирования частоты вращения.
- Высокие пусковые токи при прямом запуске.
Электродвигатели с фазным ротором частично лишены недостатков, присущих машинам с ротором конструкции “беличья клетка”. Вращающаяся часть электрической машины такого типа имеет обмотки, соединенные в схему “звезда”. Напряжение подводится к обмотке через 3 контактных кольца, закрепленных на роторе и изолированных от него.
Такие электродвигатели обладают следующими достоинствами:
- Возможность ограничивать пусковые токи при помощи резистора, включенного в цепь электромагнитов ротора.
- Больший, чем у электромашин с короткозамкнутым ротором, пусковой момент.
- Возможность регулировки скорости.
Недостатками таких двигателей являются относительно большие габариты и масса, высокая цена, более сложный ремонт и сервисное обслуживание.
Синхронные двигатели переменного тока
Как и в асинхронных электродвигателях, вращение ротора в синхронных машинах достигается взаимодействием полей ротора и статора. Скорость вращения ротора таких электрических машин равна частоте магнитного поля, создаваемого обмотками статора.
Обмотка неподвижной части двигателя рассчитана на питание от трехфазного напряжения. К электромагнитам ротора подключается постоянное напряжение. Различают явнополюсные и неявнополюсные обмотки. В синхронных двигателях малой мощности используют постоянные магниты.
Запуск и разгон синхронной машины осуществляется в асинхронном режиме. Для этого на роторе двигателя имеется обмотка конструкции “беличья клетка”. Постоянное напряжение подается на электромагниты только после разгона до номинальной частоты асинхронного режима. Синхронные двигатели имеют следующие особенности:
- Постоянная скорость вращения при переменной нагрузке.
- Высокий к.п.д. и коэффициент мощности.
- Небольшая реактивная составляющая.
- Допустимость перегрузки.
К недостаткам синхронных электродвигателей относятся:
- Высокая цена, относительно сложная конструкция.
- Сложный пуск.
- Необходимость в источнике постоянного напряжения.
- Сложность регулировки скорости вращения и момента на валу.
Все недостатки электрических машин переменного тока можно исправить установкой устройства плавного пуска или частотного преобразователя. Обоснование выбора того или иного устройства обусловлено экономической целесообразностью и требуемыми характеристиками электропривода.
Универсальные двигатели
В отдельную группу выделяют универсальные электродвигатели, которые могут работать от сети переменного тока и от источников постоянного напряжения. Они используются в электроинструментах, бытовой технике, а также других маломощных устройствах. Конструкция такой электрической машины принципиально не отличатся от двигателя постоянного тока. Главное отличие – конструкция магнитной системы и обмоток ротора. Магнитная система состоит из изолированных друг от друга секций для снижения магнитных потерь. Обмотка ротора такой машины поделена на 2 части. При питании от переменного тока напряжение подается только на ее половину. Это делается в целях снижения радиопомех, улучшения условий коммутации.
К преимуществам таких машин относятся:
- Высокая скорость вращения. Универсальные электродвигатели развивают скорость до 10 000 об/мин и более.
- Питание от переменного и постоянного напряжения. Двигатели такого типа широко применяют для электроинструментов, имеющих дополнительные аккумуляторные батареи.
- Возможность регулирования скорости без использования дополнительных устройств.
Однако, такие электромашины имеют свои недостатки:
- Ограниченная мощность.
- Необходимость обслуживания коллекторного узла.
- Тяжелые условия коммутации при питании от переменного напряжения из-за наличия трансформаторной связи между обмотками.
- Электромагнитные помехи при подключении к сети переменного тока.
Каждый тип двигателя имеет свои достоинства и недостатки. Выбор электрической машины для привода любого оборудования делается исходя из условий эксплуатации, требуемой частоты вращения, экономической целесообразности, типа нагрузки и других параметров.