Особенности подключения двигателя постоянного тока
Широко распространенные сейчас в быту и на производстве электродвигатели постоянного тока имеют много достоинств, но отличаются высокими пусковыми токами. Существует несколько распространенных вариантов подключения таких электромоторов.

Благодаря отличным тяговым возможностям электрических двигателей постоянного тока собранное на их основе электрооборудование получило широкое распространение, как в быту, так и на производстве. Такие моторы часто можно встретить в современных детских игрушках, вентиляторах, электроинструментах и автономных промышленных электроустановках. Они являются неотъемлемой частью систем управления и электрификации автомобилей. В качестве источника питания обычно используются батарейки или разноемкостные аккумуляторы.
Двигатель постоянного тока также имеет много других достоинств, среди которых:
- простая регулировка частоты вращения;
- возможность мягкого пуска и плавного увеличения оборотов;
- способность разгоняться до скорости свыше трех тысяч оборотов в минуту.
Несмотря на все эти преимущества, электромотор постоянного тока имеет более сложную конструкцию, чем асинхронный силовой агрегат переменного тока на 380 или 220 вольт, что подразумевает некоторые сложности в его эксплуатации. Кроме того, здесь есть опасность возникновения пусковых токов значительной величины, поэтому существуют разные способы подключения двигателей постоянного тока, каждый из которых имеет свои особенности и нюансы. Чтобы лучше их понять, рассмотрим более детально конструкцию, принцип работы и подключение двигателя постоянного тока.
Конструкционные особенности электромотора постоянного тока
Любой двигатель электрический состоит из двух основных деталей – статора (станины) и ротора (якоря). Как правило, у распространенных сейчас современных моторов на 12 или 22 вольта статор изнутри покрыт тонкими листами из электротехнической стали, изолированными между собой с помощью специального лака. Они образуют отдельные полюса и обмотки, заканчивающиеся расширениями в виде наконечников, которые способствуют равномерному распределению электромагнитной индукции в воздушной прослойке между статорной и роторной частью. В зависимости от конструкции и мощности электромотора, обмотка может состоять из многочисленных витков тонкого провода или же из меньшего числа витков более толстого провода.
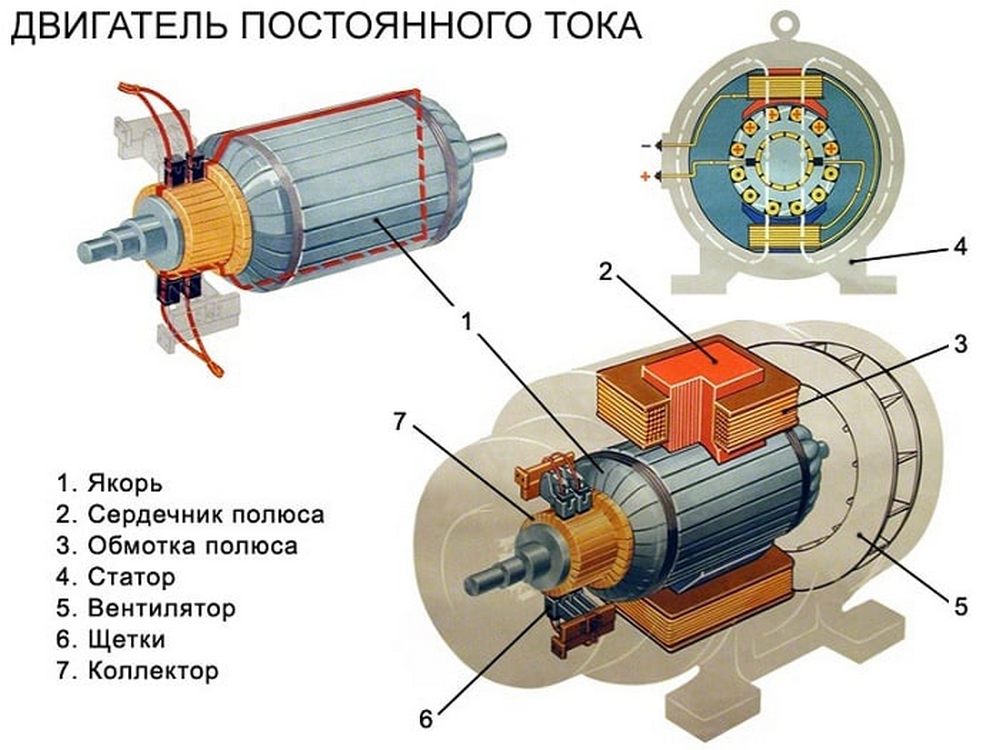
В качестве ротора обычно используется установленный на валу цилиндр с зубчатой структурой. Он помещается внутрь статора, но располагается на некотором расстоянии от него. Ротор тоже производится из тонких стальных листов с изоляцией и вентиляционными зазорами между отдельными пакетами. Якорные пазы соединяются медными проводниками. Кроме того, обязательным условием для якоря электромотора постоянного тока П или ПЛ серии является наличие обмотки двухслойного типа.
Принцип работы двигателя постоянного тока
Функционирование всех современных электромоторов базируется на принципах электромагнитной индукции и так называемом «правиле правой руки», когда ротор начинает вращаться при пропускании разнонаправленного тока вверху и внизу роторной обмотки. Согласно данному правилу, уложенные в якорные пазы проводники выталкиваются из генерируемого статором магнитного поля, тем самым придавая ускорение ротору эл двигателя.
Получается, что верхняя часть обмотки ротора начинает выталкиваться в левую сторону, а нижняя часть – в правую. Эта энергия передается непосредственно валу электромотора, вокруг которого закреплена обмотка, и тот совершает вращательное движение. Однако вращение прекращается, когда ротор проворачивается, и якорные части меняются местами. Для поддержки оборотов в электрическом двигателе постоянного тока П используется коллектор, с помощью которого производится коммутация роторной обмотки.
Теперь рассмотрим наиболее распространенные способы подключения двигателя постоянного тока. Обратите внимание, что оптимальная схема подключения к сети или аккумулятору должна соответствовать мощности силового агрегата. Различают устройства малой, средней и большой мощности.
Прямой пуск электромотора
Маломощный электрический мотор (до одного киловатта) проще всего включить напрямую. Как и подключение трехфазного двигателя 380В, такой запуск электромотора постоянного тока П предусматривает подачу напряжения от источника питания непосредственно на рабочую обмотку. Поскольку отсутствует естественная компенсация за счет противодействующей электродвижущей силы, пусковой ток достигает максимального значения.
Если рассматривать прямое включение с точки зрения физики, то ситуация выглядит следующим образом. Изначально при старте мотора сила тока имеет значение, определяемое по формуле: І=U/R, где U – номинальное напряжение, R – сопротивление катушек. При этом токовая нагрузка достигает максимальной величины и может более чем в два раза превышать номинал.
Дальнейшее протекание тока инициирует возникновение электродвижущей силы противодействия, которая выступает в роли своеобразного тормоза, нормализующего стартовую нагрузку до номинальной мощности. Расчет силы тока теперь выполняется по другой формуле: І=U-Е/R, где Е – ЭДС противодействия.
В мощных силовых агрегатах, например, крановых двигателях ДК213МД2 сопротивление роторных обмоток может достигать одного Ома, что провоцирует возникновение пускового тока до 500 ампер, что в десятки раз превышает допустимое значение. Это может вызвать термическое опускание металла, оплавление и деформацию проводов, порчу контактных щеток и колец, а также создает повышенную опасность поражения электрическим током обслуживающего персонала. Поэтому для включения электромоторов средней (например, серии Д) и большой мощности рекомендуется использовать реостаты, специальные регуляторы или заведомо низкое напряжение. Прямой пуск для них противопоказан.
Подключение через микросхему Arduino
Двигатели малой мощности также можно запускать с помощью специальных функциональных платформ. Таким распространенным сейчас способом является подключения моторчика постоянного тока к Ардуино. Напрямую через Arduino подключение лучше не делать, поскольку велика вероятность повредить микросхему. Рекомендуется использовать Н-мост или транзисторы. Такая технология внедрения электромоторов в функциональные контуры предоставляет много возможностей для управления и приведения в движение рабочих частей электромашин, современных транспортных средств и роботизированных механизмов. Можно контролировать не только скорость оборотов моторчика, но и направление его движения.
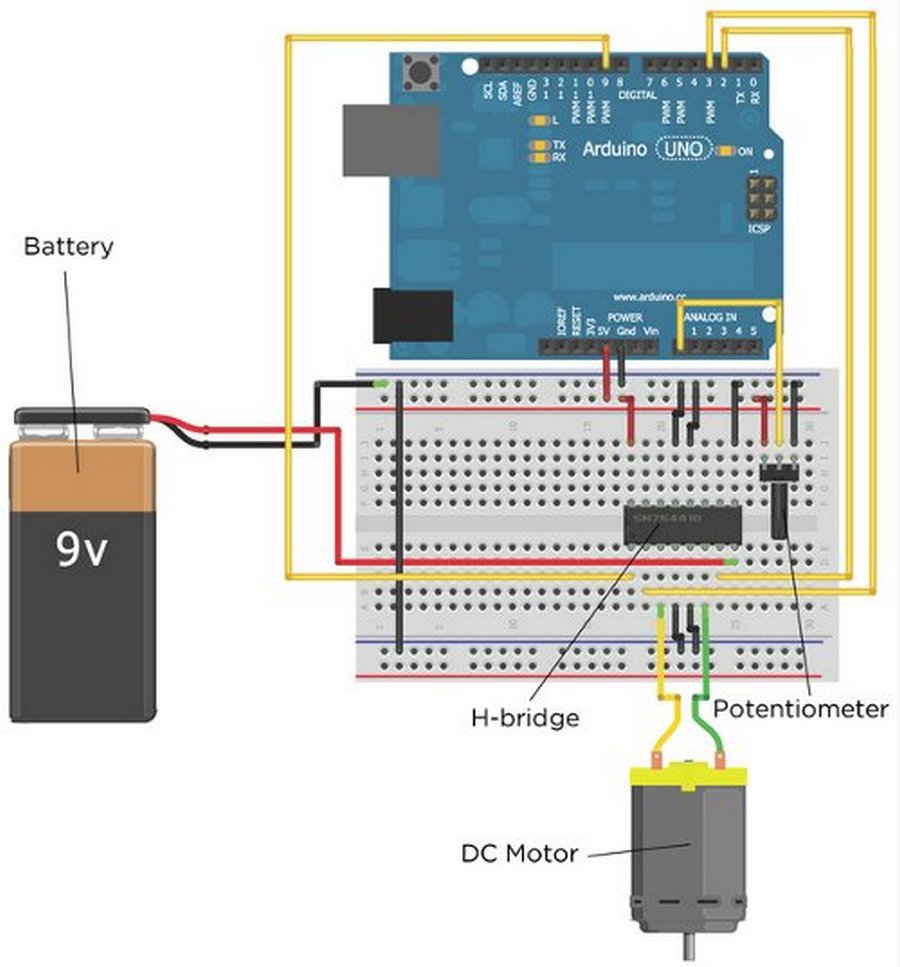
Прямое подсоединение к выходным портам платформы может не только вызвать их перегорание, но также сведет функциональные возможности управления электромотором к минимуму. Через каждый такой порт может подаваться ток величиной около двадцати миллиампер, а для нормальной работы даже самого компактного электрического моторчика требуется во много раз больше. Поэтому мотор нужно подключить к Ардуино последовательно через регулятор силы подаваемого тока.
Выбирая подходящий двигатель для подключения к микроконтроллеру, следует обратить внимание на следующие характеристики:
- потребляемый ток, необходимый для нормального функционирования оборудования;
- напряжение номинальное (наиболее распространенное для таких систем – 12 вольт);
- вращательный момент – чем он больше, тем мощнее агрегат;
- скорость оборотов вала электромотора;
- вес и габариты – предпочтение сейчас отдается миниатюрным моделям.
Легче всего осуществляется последовательное подключение к Ардуино стандартного щеточного электромотора постоянного тока, рассчитанного на силу тока до 5A и рабочее напряжение около 9B. Для этого часто используют транзисторную систему. Но она позволяет только контролировать скорость оборотов. Подключение к микроконтроллеру через H-мост дает возможность также регулировать и направление вращения.
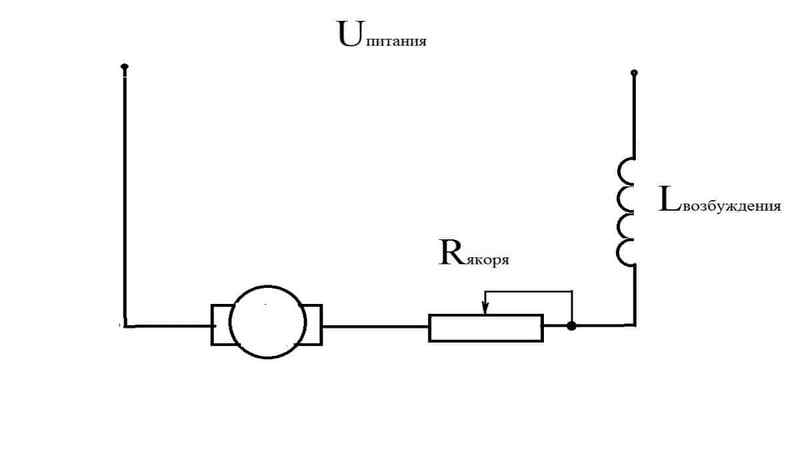
Включение через пусковой реостат
Такая схема подключения предусматривает наличие в пусковой цепи электромотора дополнительного устройства, создающего переменное сопротивление. Есть несколько способов, как подключить его и какое именно устройство использовать. Но цель здесь одна – обеспечить снижение токовой нагрузки на старте до достижения валом оптимальной скорости вращения. В процессе стабилизации силы тока сопротивление реостата должно меняться от максимума до минимума. Расчет производится по формуле: І=U/R+R(реостата).
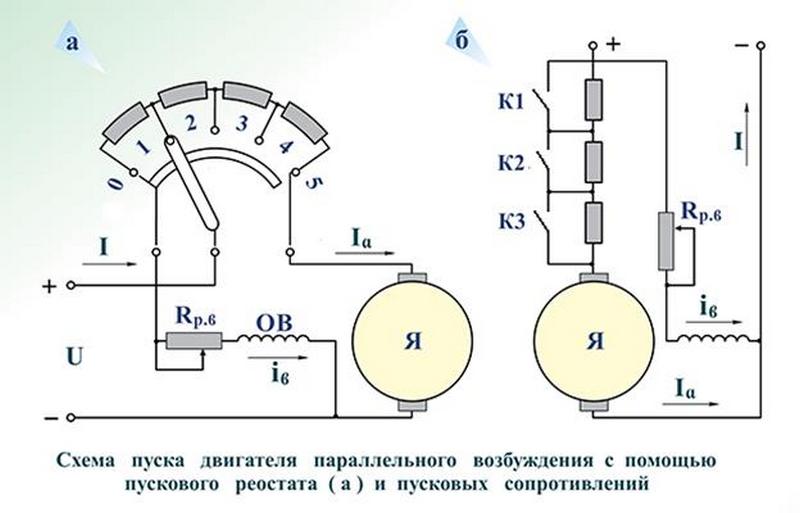
Многим наверняка известны еще со школьных занятий по физике подобные опыты, когда сопротивление менялось вручную путем перемещения ползунка реостата. Однако на производстве такой способ малоэффективен и плохо согласовывается с токовыми величинами, поэтому применяется редко. Чаще используется вариант подключения с регулировкой по току или по электродвижущей силе в обмотках возбуждения. Также распространен монтаж к реле времени, где независимое управление отдельными ступенями осуществляется посредством временной выдержки.
Отличительной особенностью силовых агрегатов переменного тока (в отличие от рассчитанных на переменку 3ф или напряжение тока 220 вольт) – это наличие обмоток возбуждения. Перечисленные выше способы подключения применимы для электромоторов всех типов возбуждения:
- независимого;
- параллельного;
- последовательного;
- смешанного.
Но здесь есть некоторые нюансы. Моторы независимого возбуждения нельзя запускать на холостом ходу или при малых нагрузках, иначе агрегат будет поврежден от резко возросшей скорости вращения. При параллельном подсоединении через обмотку возбуждения проходит намного меньший ток, чем через роторную часть, поэтому мотор имеет жесткие характеристики, полезные для станков или вентиляторов. Если соединить ротор и обмотку возбуждения последовательно, то по ним будет протекать ток одинаковой величины. Такой силовой агрегат, распространенный в современном электротранспорте, имеет хорошие пусковые свойства, но тоже боится запуска на холостом ходу.
Устройство и подключение однофазных электродвигателей 220В
 Электродвигатели
Электродвигатели
Однофазные электродвигатели 220В широко используются в разнообразных бытовых и промышленных устройствах: холодильниках, стиральных машинах, насосах, дрелях, заточных и подобных им обрабатывающих станках. Их технические характеристики несколько уступают свойствам трехфазных двигателей. Существует два наиболее распространенных типа однофазных электродвигателей для сети переменного тока промышленной частоты:
- асинхронные;
- коллекторные.
Первые более просты по своему устройству, но обладают рядом недостатков, главные из которых — трудности с изменением направления и частоты вращения ротора.
Далее рассмотрены однофазные асинхронные электродвигатели и коллекторные двигатели переменного тока.
Однофазные асинхронные электродвигатели
Устройство и принцип действия
Мощность такого однофазного двигателя 220В может в зависимости от конструкции находиться в пределах от 5 Вт до 10 кВт. Его ротор — это обычно короткозамкнутая обмотка («беличья клетка») — медные или алюминиевые стержни, замкнутые с торцов.
Такой однофазный двигатель, как правило, имеет две смещенные на 90° друг относительно друга обмотки. Рабочая (главная) при этом занимает большую часть пазов статора, а пусковая (вспомогательная) — оставшуюся. И однофазным его называют потому, что у него лишь одна рабочая обмотка.
Переменный ток, протекающий по главной обмотке, создает периодически меняющееся магнитное поле. Его можно считать состоящим из двух круговых с одинаковой амплитудой, вращающихся навстречу друг другу.
По закону электромагнитной индукции в замкнутых витках ротора меняющийся магнитный поток создает индукционный ток, взаимодействующий с порождающим его полем. Если ротор неподвижен, моменты действующих на него сил одинаковы, вследствие чего ротор остается неподвижным.
Если же ротор начать вращать, то равенство моментов этих сил нарушится, поскольку скольжение его витков относительно вращающихся магнитных полей станет разным. Как следствие — сила Ампера, действующая на витки ротора со стороны прямого магнитного поля, будет значительно больше, чем со стороны обратного.
Индукционный ток в витках ротора может возникать лишь при пересечении ими силовых линий магнитного поля. А для этого они должны вращаться со скоростью, чуть меньшей, чем частота вращения поля (при одной паре полюсов — 3000 об/мин). Отсюда и название, которое получили такие электродвигатели, асинхронные.
При увеличении механической нагрузки скорость вращения уменьшается, возрастает величина индукционного тока в витках ротора. Как следствие — возрастают и механическая мощность двигателя, и мощность потребляемого им переменного тока.
Схема запуска и подключения
Понятно, что раскручивать вручную ротор при каждом запуске электродвигателя неудобно. Для создания первоначального пускового момента и используется пусковая обмотка. Поскольку она составляет с рабочей обмоткой прямой угол, для создания вращающегося магнитного поля ток в ней должен быть сдвинут по фазе относительно тока в рабочей обмотке тоже на 90°.
Добиться этого можно включением в цепь ее питания фазосмещающего элемента. Резистор или дроссель обеспечить фазовый сдвиг в 90° не могут, поэтому в большинстве ситуаций логично использование конденсатора в качестве фазосмещающего элемента. В этом случае однофазный электродвигатель обладает наилучшими пусковыми свойствами.
Когда фазовращающий элемент является конденсатором, однофазные электродвигатели конструктивно могут быть такими:
- с пусковым конденсатором (рис. а);
- с пусковым и рабочим (рис. б);
- только с рабочим конденсатором (рис. в).
Первый (наиболее распространенный) вариант предусматривает подключение пусковой обмотки с конденсатором ненадолго на время пуска, после чего они отключаются. Реализовать его можно с помощью реле времени, а то и просто за счет замыкания цепи во время нажатия пусковой кнопки. Эта схема запуска характеризуется сравнительно небольшим пусковым током, но в номинальном режиме характеристики невысоки. Причина в том, что поле статора является эллиптическим (в направлении полюсов оно сильнее, чем в перпендикулярном).
Схема с рабочим, постоянно включенным конденсатором лучше работает в номинальном режиме, но имеет посредственные пусковые характеристики. Вариант с пусковым и рабочим конденсатором является промежуточным между двумя описанными выше. Расчет значений их емкостей сравнительно прост: у рабочего 0,75 мкФ на 1 кВт мощности, у пускового — в 2,5 раза больше.
Коллекторный двигатель переменного тока
Рассмотрим коллекторный двигатель переменного тока. Универсальные коллекторные электродвигатели могут питаться от источников как переменного, так и постоянного тока. Они часто используются в электроинструментах, швейных и стиральных машинах, мясорубках — там, где нужен реверс, регулировка частоты вращения ротора или его вращение с частотой более 3000 об/мин.
Обмотки статора и ротора коллекторного электродвигателя соединяются последовательно. К обмоткам ротора ток подводится через щетки, соприкасающиеся с пластинами коллектора, к которым подсоединяются концы обмоток ротора.
Реверс однофазного двигателя с коллектором осуществляется за счет изменения полярности включения в сеть обмоток статора или ротора, а скорость вращения можно регулировать, изменяя величину тока в обмотках.
Основные недостатки такого двигателя:
- высокая стоимость;
- сложность устройства, практическая невозможность самостоятельно осуществить его ремонт;
- значительный уровень шума, трудное управление, создание радиопомех.
Остается добавить, что при использовании устройств, содержащих однофазный электродвигатель, следует самое пристальное внимание уделить выбору его типа, схеме подключения, тому, как правильно осуществить расчет элементов.
Коллекторный электродвигатель постоянного тока
Конструкция коллекторного электродвигателя постоянного тока
Статор — неподвижная часть двигателя.
Индуктор (система возбуждения) — часть коллекторной машины постоянного тока или синхронной машины, создающая магнитный поток для образования момента. Идуктор обязательно включает либо постоянные магниты либо обмотку возбуждения. Индуктор может быть частью как ротора так и статора. В двигателе, изображенном на рис. 1, система возбуждения состоит из двух постоянных магнитов и входит в состав статора.
Якорь — часть коллекторной машины постоянного тока или синхронной машины, в которой индуктируется электродвижущая сила и протекает ток нагрузки [2]. В качестве якоря может выступать как ротор так и статор. В двигателе, показанном на рис. 1, ротор является якорем.
Щетки — часть электрической цепи, по которой от источника питания электрический ток передается к якорю. Щетки изготавливаются из графита или других материалов. Двигатель постоянного тока содержит одну пару щеток или более. Одна из двух щеток соединяется с положительным, а другая — с отрицательным выводом источника питания.
Коллектор — часть двигателя, контактирующая со щетками. С помощью щеток и коллектора электрический ток распределяется по катушкам обмотки якоря [1].
Типы коллекторных электродвигателей
По конструкции статора коллекторный двигатель может быть с постоянными магнитами и с обмотками возбуждения.
Коллекторный двигатель с постоянными магнитами

Коллекторный двигатель постоянного тока (КДПТ) с постоянными магнитами является наиболее распространенным среди КДПТ. Индуктор этого двигателя включает постоянные магниты, которые создают магнитное поле статора. Коллекторные двигатели постоянного тока с постоянными магнитами (КДПТ ПМ) обычно используются в задачах не требующих больших мощностей. КДПТ ПМ дешевле в производстве, чем коллекторные двигатели с обмотками возбуждения. При этом момент КДПТ ПМ ограничен полем постоянных магнитов статора . КДПТ с постоянными магнитами очень быстро реагирует на изменение напряжения. Благодаря постоянному полю статора легко управлять скоростью двигателя. Недостатком электродвигателя постоянного тока с постоянными магнитами является то, что со временем магниты теряют свои магнитные свойства, в результате чего уменьшается поле статора и снижаются характеристики двигателя.
- Преимущества:
- лучшее соотношение цена/качество
- высокий момент на низких оборотах
- быстрый отклик на изменение напряжения
- Недостатки:
- постоянные магниты со временем, а также под воздействием высоких температур теряют свои магнитные свойства
Коллекторный двигатель с обмотками возбуждения
- По схеме подключения обмотки статора коллекторные электродвигатели с обмотками возбуждения разделяют на двигатели:




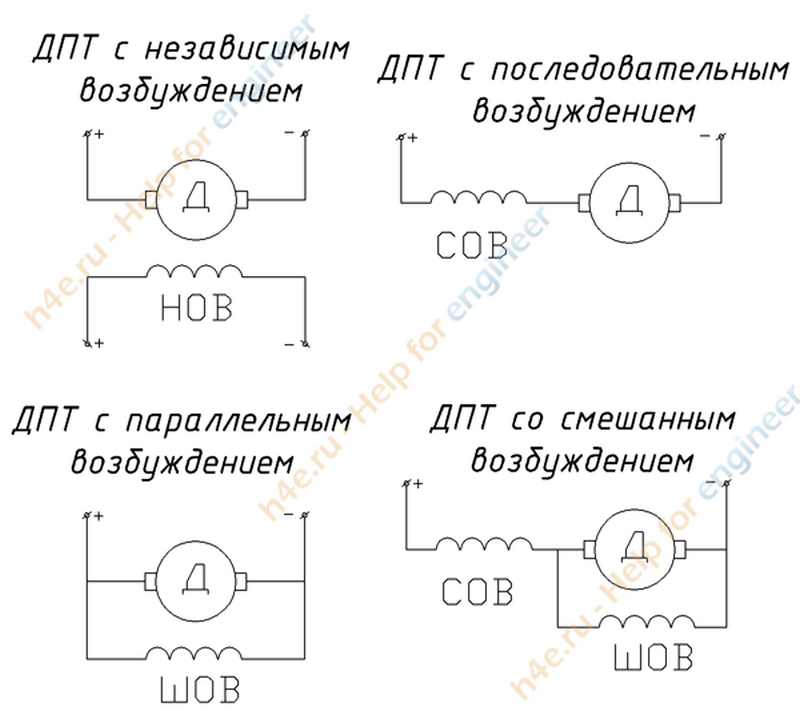
Двигатели независимого и параллельного возбуждения
В электродвигателях независимого возбуждения обмотка возбуждения электрически не связана с обмоткой якоря (рисунок выше). Обычно напряжение возбуждения UОВ отличается от напряжения в цепи якоря U. Если же напряжения равны, то обмотку возбуждения подключают параллельно обмотке якоря. Применение в электроприводе двигателя независимого или параллельного возбуждения определяется схемой электропривода. Свойства (характеристики) этих двигателей одинаковы [3].
В двигателях параллельного возбуждения токи обмотки возбуждения (индуктора) и якоря не зависят друг от друга, а полный ток двигателя равен сумме тока обмотки возбуждения и тока якоря. Во время нормальной работы, при увеличении напряжения питания увеличивается полный ток двигателя, что приводит к увеличению полей статора и ротора. С увеличением полного тока двигателя скорость так же увеличивается, а момент уменьшается. При нагружении двигателя ток якоря увеличивается, в результате чего увеличивается поле якоря. При увеличении тока якоря, ток индуктора (обмотки возбуждения) уменьшается, в результате чего уменьшается поле индуктора, что приводит к уменьшению скорости двигателя, и увеличению момента.
- Преимущества:
- практически постоянный момент на низких оборотах
- хорошие регулировочные свойства
- отсутствие потерь магнетизма со временем (так как нет постоянных магнитов)
- Недостатки:
- дороже КДПТ ПМ
- двигатель выходит из под контроля, если ток индуктора падает до нуля
Коллекторный электродвигатель параллельного возбуждения имеет механическую характеристику с уменьшающимся моментом на высоких оборотах и высоким, но более постоянным моментом на низких оборотах. Ток в обмотке индуктора и якоря не зависит друг от друга, таким образом, общий ток электродвигателя равен сумме токов индуктора и якоря. Как результат данный тип двигателей имеет отличную характеристику управления скоростью. Коллекторный двигатель постоянного тока с параллельной обмоткой возбуждения обычно используется в приложениях, которые требуют мощность больше 3 кВт, в частности в автомобильных приложениях и промышленности. В сравнении с КДПТ ПМ, двигатель параллельного возбуждения не теряет магнитные свойства со временем и является более надежным. Недостатками двигателя параллельного возбуждения являются более высокая себестоимость и возможность выхода двигателя из под контроля, в случае если ток индуктора снизится до нуля, что в свою очередь может привести к поломке двигателя [5].
Двигатель последовательного возбуждения
В электродвигателях последовательного возбуждения обмотка возбуждения включена последовательно с обмоткой якоря, при этом ток возбуждения равен току якоря (Iв = Iа), что придает двигателям особые свойства. При небольших нагрузках, когда ток якоря меньше номинального тока (Iа < Iном) и магнитная система двигателя не насыщена (Ф
Iа), электромагнитный момент пропорционален квадрату тока в обмотке якоря:
- где M – момент электродвигателя, Н∙м,
- сМ – постоянный коэффициент, определяемый конструктивными параметрами двигателя,
- Ф – основной магнитный поток, Вб,
- Ia – ток якоря, А.
С ростом нагрузки магнитная система двигателя насыщается и пропорциональность между током Iа и магнитным потоком Ф нарушается. При значительном насыщении магнитный поток Ф с ростом Iа практически не увеличивается. График зависимости M=f(Ia) в начальной части (когда магнитная система не насыщена) имеет форму параболы, затем при насыщении отклоняется от параболы и в области больших нагрузок переходит в прямую линию [3].
Способность двигателей последовательного возбуждения развивать большой электромагнитный момент обеспечивает им хорошие пусковые свойства.
- Преимущества:
- высокий момент на низких оборотах
- отсутствие потерь магнетизма со временем
- Недостатки:
- низкий момент на высоких оборотах
- дороже КДПТ ПМ
- плохая управляемость скоростью из-за последовательного соединения обмоток якоря и индуктора
- двигатель выходит из под контроля, если ток индуктора падает до нуля
Коллекторный двигатель последовательного возбуждения имеет высокий момент на низких оборотах и развивает высокую скорость при отсутствии нагрузки. Данный электромотор идеально подходит для устройств, которым требуется развивать высокий момент (краны и лебедки), так как ток и статора и ротора увеличивается под нагрузкой. В отличии от КДПТ ПМ и двигателей параллельного возбуждения двигатель последовательного возбуждения не имеет точной характеристики контроля скорости, а в случае короткого замыкания обмотки возбуждения он может стать не управляемым.
Двигатель смешанного возбуждения
Двигатель смешанного возбуждения имеет две обмотки возбуждения, одна из них включена параллельно обмотке якоря, а вторая последовательно. Соотношение между намагничивающими силами обмоток может быть различным, но обычно одна из обмоток создает большую намагничивающую силу и эта обмотка называется основной, вторая обмотка называется вспомогательной. Обмотки возбуждения могут быть включены согласовано и встречно, и соответственно магнитный поток создается суммой или разностью намагничивающих сил обмоток. Если обмотки включены согласно, то характеристики скорости такого двигателя располагаются между характеристиками скорости двигателей параллельного и последовательного возбуждения. Встречное включение обмоток применяется, когда необходимо получить неизменную скорость вращения или увеличение скорости вращения с увеличением нагрузки. Таким образом, рабочие характеристики двигателя смешанного возбуждения приближаются к характеристикам двигателя параллельного или последовательного возбуждения, смотря по тому, какая из обмоток возбуждения играет главную роль [4].
- Преимущества:
- хорошие регулировочные свойства
- высокий момент на низких оборотах
- менее вероятен выход из под контроля
- отсутствие потерь магнетизма со временем
- Недостатки:
- дороже других коллекторных двигателей
Двигатель смешанного возбуждения имеет эксплуатационные характеристики двигателей с параллельным и последовательным возбуждением. Он имеет высокий момент на низких оборотах, так же как двигатель последовательного возбуждения и хороший контроль скорости, как двигатель параллельного возбуждения. Двигатель смешанного возбуждения идеально подходит для устройств автомобилей и промышленности (таких как генераторы). Выход двигателя смешанного возбуждения из под контроля менее вероятен, так как для этого ток параллельной обмотки возбуждения должен уменьшиться до нуля, а последовательная обмотка возбуждения должна быть закорочена.
Характеристики коллекторного электродвигателя постоянного тока
Эксплуатационные свойства двигателей постоянного тока определяются их рабочими, электромеханическими и механическими характеристиками, а также регулировочными свойствами.

Основные параметры электродвигателя постоянного тока
Постоянная момента
Для коллекторного электродвигателя постоянного тока постоянная момента определяется по формуле:




