FAQ по электродвигателям
Наиболее распространены асинхронные электродвигатели с короткозамкнутым ротором. Они имеют сравнительно простую конструкцию и относительно недороги.
Для работы асинхронного двигателя требуется трехфазное напряжение, создающее на обмотках статора вращающееся магнитное поле. Это поле приводит в движение ротор двигателя, который передает крутящий момент на нагрузку, например, на пропеллер вентилятора или редуктор конвейера. Изменяя конфигурацию обмоток статора, можно менять основные характеристики привода – частоту оборотов и мощность на валу. В случае работы асинхронного электродвигателя в однофазной сети применяют фазосдвигающие и пусковые конденсаторы.

Также в настоящее время находят применение двигатели постоянного тока. Данные приводы имеют щетки, подверженные износу и искрению. Кроме того, необходима обмотка подмагничивания (возбуждения), на которую подается постоянное напряжение. Несмотря на эти недостатки, электродвигатели постоянного тока используются там, где необходимо быстрое изменение скорости вращения и контроль момента, а также при мощностях более 100 кВт.
В быту также применяют коллекторные (щеточные) электродвигатели переменного тока, которые имеют низкую надежность по сравнению с асинхронными.
2. Какие способы управления электродвигателями используются на практике?
Управление электродвигателем подразумевает возможность изменения его скорости и мощности. Так, если на асинхронный двигатель подать напряжение заданной величины и частоты, он будет вращаться с номинальной скоростью и сможет обеспечить мощность на валу не более номинала. Если же нужно понизить или повысить скорость электродвигателя, используют преобразователи частоты. ПЧ может обеспечить нужный режим разгона и торможения, а также позволит оперативно управлять частотой работы.
Для обеспечения требуемого разгона и торможения без изменения рабочей частоты применяют устройство плавного пуска (УПП). Если нужно управлять только разгоном двигателя, используют схему включения «звезда-треугольник».
Для запуска двигателей без ПЧ и УПП широко применяются контакторы, которые позволяют дистанционно управлять пуском, остановом и реверсом.
3. Как прозвонить электродвигатель и определить его сопротивление?
Асинхронный электродвигатель, как правило, имеет три обмотки. У каждой обмотки есть по два вывода, которые должны быть обозначены в клеммной коробке двигателя. Если выводы обмоток известны, то можно легко прозвонить каждую из них и сравнить величину сопротивления с остальными обмотками. Если величины сопротивлений отличаются не более, чем на 1%, то скорее всего, обмотки исправны.
Сопротивление обмоток электродвигателя измеряется с помощью омметра, как и сопротивление обмоток трансформатора. Чем больше мощность двигателя, тем меньше сопротивление его обмоток, и наоборот.
4. Как определить мощность электродвигателя?
Проще всего определить номинальную мощность электродвигателя по шильдику. На нем указана механическая мощность (мощность на валу), значение которой всегда меньше потребляемой мощности за счет потерь на трение и нагрев. Однако, если шильдик на корпусе двигателя отсутствует, можно очень приблизительно оценить характеристики привода по его габаритам. При одинаковой мощности двигатель с бо́льшим диаметром вала будет иметь более высокую мощность на валу и меньшую частоту оборотов.
Также мощность можно определить по нагрузке и по настройкам защитных устройств, через которые питается двигатель (мотор-автомат, тепловое реле).
Еще один способ – включаем двигатель на номинальную мощность, обеспечив нужную нагрузку на валу. После этого измеряем токоизмерительными клещами ток, который должен быть одинаков по всем обмоткам. Для приблизительной оценки мощности асинхронного двигателя, подключенного по схеме «звезда», нужно разделить номинальный измеренный ток на 2.
5. Как увеличить или уменьшить обороты электродвигателя?
Управление скоростью вращения двигателя необходимо в трех режимах работы – при разгоне, торможении, и в рабочем режиме.
Наиболее универсальный способ управления оборотами — использование частотного преобразователя. Настройками ПЧ можно добиться любой частоты вращения в пределах технической возможности. При этом можно управлять и другими параметрами электродвигателя, а также следить за его состоянием во время работы. Частоту можно менять и плавно, и ступенчато.
Управление оборотами двигателя в режиме разгона и торможения возможно при использовании УПП. Это устройство позволяет значительно снизить пусковой ток за счет плавного разгона с медленным увеличением оборотов.
6. Как рассчитать ток и мощность электродвигателя?
Бывает так, что известен ток асинхронного двигателя (по измерениям в номинальном режиме или по шильдику), но неизвестна его мощность. Как в таком случае рассчитать мощность? Обычно используют следующую формулу:
Р = I (1,73·U·cosφ·η)
где:
Р – номинальная полезная мощность на валу двигателя в Вт (указывается на шильдике),
I – ток двигателя, А,
U – напряжение питания обмоток (380 В при подключении в «звезду», 220 В при подключении в «треугольник»),
cosφ, η – коэффициенты мощности и полезного действия для учета потерь (обычно 0,7…0,8).
Для расчета тока по известной мощности пользуются обратной формулой:
I = P/(1,73·U·cosφ·η)
Для двигателей мощностью 1,5 кВт и более, обмотки которых подключены в «звезду» (это подключение используется чаще всего), существует простое эмпирическое правило – чтобы приблизительно оценить ток двигателя, нужно умножить его мощность на 2.
7. Как увеличить мощность электродвигателя?
Номинальная мощность на валу, которая указывается на шильдике двигателя, обычно ограничивается допустимым током, а значит – нагревом корпуса привода. Поэтому при увеличении мощности необходимо предпринять дополнительные меры по охлаждению электродвигателя, установив отдельный вентилятор.
При использовании преобразователя частоты для повышения мощности можно изменить несущую частоту ШИМ, однако следует избегать перегрева ПЧ. Мощность также можно увеличить с помощью редуктора или ременной передачи, пожертвовав количеством оборотов, если это допустимо.
Если приведенные советы неприменимы – придётся менять двигатель на более мощный.
8. Каковы потери мощности при подключении трехфазного двигателя к однофазной сети (380 на 220)?
При таком подключении используются пусковой и рабочий фазосдвигающие конденсаторы. Номинальную мощность на валу в данном случае получить не удастся, и потери мощности составят 20-30% от номинала. Это происходит из-за невозможности обеспечить отсутствие перекоса по фазам при изменении нагрузки.
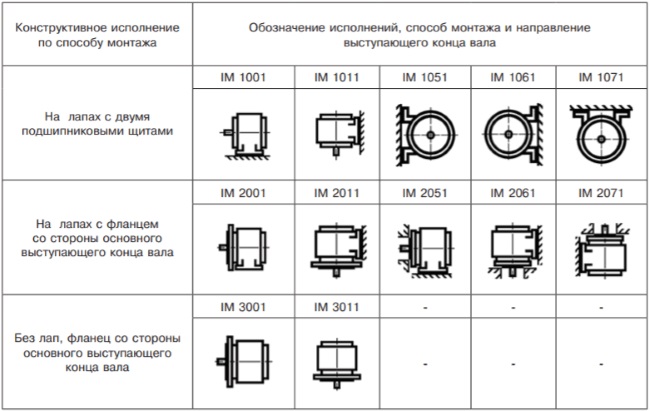
9. Какие исполнения двигателей бывают?
В зависимости от исполнения электродвигатели классифицируются по способу монтажа, классу защиты, климатическому исполнению. Существует два основных способа монтажа асинхронных электродвигателей – на лапах и через фланец. Оба варианта исполнения в различных комбинациях показаны в таблице ниже.
Виды климатического исполнения предполагают использование двигателя в определенных климатических зонах: умеренный климат (У), холодный климат (ХЛ), умеренно-холодный климат (УХЛ), тропический климат (Т), общеклиматическое исполнение (О), общеклиматическое морское исполнение (ОМ), всеклиматическое исполнение (В). Также различают категории размещения (на открытом воздухе, под навесом или в помещении и т.д.).
Класс защиты обозначает характер защиты двигателя от попадания пыли и влаги. Наиболее часто встречаются приводы с классами IP55 и IP55.
10. Зачем электродвигателю тормоз?
В некоторых устройствах (лифтах, электроталях, лебедках) при остановке двигателя необходимо зафиксировать его вал в неподвижном состоянии. Для этого применяют электромагнитный механический тормоз, который входит в конструкцию двигателя и располагается в его задней части. Управление тормозом осуществляется с помощью частотного преобразователя или схемы на контакторах.
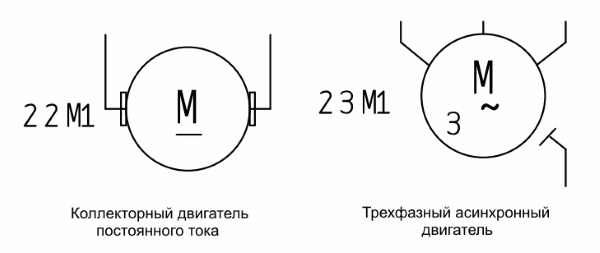
11. Как двигатель обозначается на электрических схемах?
Электродвигатель обозначается на схемах с помощью буквы «М», вписанной в круг. Также на схемах могут быть указаны порядковый номер двигателя, количество фаз (1 или 3), род тока (переменный или постоянный), способ включения обмоток ( «звезда» или «треугольник»), мощность. Примеры обозначений показаны ниже.
12. Почему греется электродвигатель?
Двигатель может нагреваться по одной из следующих причин:
- износ подшипников и повышенное механическое трение
- увеличение нагрузки на валу
- перекос напряжения питания
- пропадание фазы
- замыкание в обмотке
- проблема с обдувом (охлаждением)
Нагрев двигателя резко снижает его ресурс и КПД, а также может приводить к поломке привода.
13. Типичные неисправности электродвигателей
Выделяют два вида неисправностей электродвигателей: электрические и механические.
К электрическим относятся неисправности, связанные с обмоткой:
- межвитковое замыкание
- замыкание обмотки на корпус
- обрыв обмотки
Для устранения этих неисправностей требуется перемотка двигателя.
- износ и трение в подшипниках
- проворачивание ротора на валу
- повреждение корпуса двигателя
- проворачивание или повреждение крыльчатки обдува
Замена подшипников должна производиться регулярно с учетом их износа и срока службы. Крыльчатка также меняется в случае повреждения. Остальные неисправности устранению практически не подлежат, и единственный выход — замена двигателя.
Если у вас есть вопросы, ответы на которые вы не нашли в данной статье, напишите нам. Будем рады помочь!
Как увеличить скорость электродвигателя
Группа: Участники форума
Сообщений: 234
Регистрация: 15.4.2007
Пользователь №: 7155
Решил создать отдельную тему.
У нас на производстве на конвейерах стоят 12шт. Danfoss VLT2800 на 0.75 кВт, работают на двигатели 0.5кВт. Обычно работают на частотах 10-30 Гц, чаще 10. Ошибся механик-конструктор. Работают уже год, нареканий нет. Недавно купили еще 5шт. Один из них на 2.2кВт на шестеренчатый насос 1.5 кВт, качает шоколад. Вот тут и начались проблемы. Механик- конструктор опять ошибся с производительностью, как вывод нужно поднимать частоту, на 80 Гц нормально, а на 90 может уйти через некоторое время двигатель в перегрев, аж воняет. Непонятно почему.
Есть у нас еще таких же 3 насоса, подключены к Mitsubishi FR-S540 2.2кВт, там приходится выставлять и по 120 Гц, опять ошибся механик-конструктор. Здесь такого не происходит.
Вопрос, как можно заставить Danfoss VLT2800 заставить хорошо работать на повышенных частотах.
Я бы этого конструктора придушил.
ScrewDriver
![]()
Просмотр профиля
Группа: Участники форума
Сообщений: 449
Регистрация: 15.5.2007
Из: Барнаул->Москва
Пользователь №: 8174
ZPavel
![]()
Просмотр профиля
Группа: Участники форума
Сообщений: 234
Регистрация: 15.4.2007
Пользователь №: 7155
Gizmo
![]()
Просмотр профиля
Группа: Участники форума
Сообщений: 80
Регистрация: 6.6.2007
Пользователь №: 9349
fuel
![]()
Просмотр профиля
Группа: Участники форума
Сообщений: 268
Регистрация: 5.9.2007
Пользователь №: 11086
ZPavel
![]()
Просмотр профиля
Группа: Участники форума
Сообщений: 234
Регистрация: 15.4.2007
Пользователь №: 7155
fuel
![]()
Просмотр профиля
Группа: Участники форума
Сообщений: 268
Регистрация: 5.9.2007
Пользователь №: 11086
vladun
![]()
Просмотр профиля
Группа: Участники форума
Сообщений: 3069
Регистрация: 6.9.2006
Пользователь №: 3907
ZPavel
![]()
Просмотр профиля
Группа: Участники форума
Сообщений: 234
Регистрация: 15.4.2007
Пользователь №: 7155
fuel
![]()
Просмотр профиля
Группа: Участники форума
Сообщений: 268
Регистрация: 5.9.2007
Пользователь №: 11086
fuel
![]()
Просмотр профиля
Группа: Участники форума
Сообщений: 268
Регистрация: 5.9.2007
Пользователь №: 11086
fuel
![]()
Просмотр профиля
Группа: Участники форума
Сообщений: 268
Регистрация: 5.9.2007
Пользователь №: 11086
vladun
![]()
Просмотр профиля
Группа: Участники форума
Сообщений: 3069
Регистрация: 6.9.2006
Пользователь №: 3907
fuel
![]()
Просмотр профиля
Группа: Участники форума
Сообщений: 268
Регистрация: 5.9.2007
Пользователь №: 11086
vladun
![]()
Просмотр профиля
Группа: Участники форума
Сообщений: 3069
Регистрация: 6.9.2006
Пользователь №: 3907
fuel
![]()
Просмотр профиля
Группа: Участники форума
Сообщений: 268
Регистрация: 5.9.2007
Пользователь №: 11086
Я веду речь о классической функции компенсации скольжения, которая при жесткой U/f характеристике предназначена именно для компенсации потери скорости, т.е. выставили 1500 об/мин и двигатель крутится 1500 обортов, а не 1480, при этом при увеличении частоты напряжение увеличивается согласно жестко заданной U/f характеристике.
Есть функция автоматическое форсирование момента (автобуст), которая как раз предназначена для защиты от опрокидывания, при отсутствии перегрузки двигатель работает по заданной U/f характеристике, а при повышении момента на валу для предотвращения опрокидывания ПЧ автоматически изменяет соотношение U/f с учетом оценки магнитного потока.
А что толку от контроля магнитного потока выше 50 Гц, если на него можно повлиять только одним параметром — частотой. Повысили частоту — уменьшился магнитный поток и критический момент, понизили частоту — повысился критический момент. В любом случае увеличивая частоту магнитный поток в двигателе ослабляется и ПЧ ничего с этим сделать не сможет, как только самопроизвольно запретить повышение частоты. Но разве можно этот режим уже назвать компенсацией скольжения??
При частоте выше 50 Гц ПЧ не может держать намагничивание в норме, потому что не может держать отношение U/f.
Сообщение отредактировал fuel — 28.9.2007, 12:52
fuel
![]()
Просмотр профиля
Группа: Участники форума
Сообщений: 268
Регистрация: 5.9.2007
Пользователь №: 11086
В первый раз слышу об автоматическом определении количества полюсов у двигателя, честно. А про направление вращения тем более, может Вы имели ввиду, что при любом чередовании фаз на входе на выходе ПЧ чередование всегда правильное?
fuel
![]()
Просмотр профиля
Группа: Участники форума
Сообщений: 268
Регистрация: 5.9.2007
Пользователь №: 11086
fuel
![]()
Просмотр профиля
Группа: Участники форума
Сообщений: 268
Регистрация: 5.9.2007
Пользователь №: 11086
ZPavel
![]()
Просмотр профиля
Группа: Участники форума
Сообщений: 234
Регистрация: 15.4.2007
Пользователь №: 7155
fuel
![]()
Просмотр профиля
Группа: Участники форума
Сообщений: 268
Регистрация: 5.9.2007
Пользователь №: 11086
Kass
![]()
Просмотр профиля
Группа: Участники форума
Сообщений: 2841
Регистрация: 22.12.2006
Из: Москва
Пользователь №: 5301
ИМХО ваша проблема решается в два этапа:
1. Надо уволить механика конструктора.
2. Поставить частотник с векторным управлением. ИМХО Митсы у вас со векторным управлением, вот и проблем нет. Скалярное управление в таких режимах не поможет.
Сообщение отредактировал Kass — 28.9.2007, 22:15
vladun
![]()
Просмотр профиля
Группа: Участники форума
Сообщений: 3069
Регистрация: 6.9.2006
Пользователь №: 3907
fuel
![]()
Просмотр профиля
Группа: Участники форума
Сообщений: 268
Регистрация: 5.9.2007
Пользователь №: 11086
to vladun:
Нету у FR S540 векторного управления, и насыщение не причем.
to ZPavel:
Учитывая что на частоте 80 Гц ток 1.8А, а на 90 Гц 1.7А (снижение из-за уменьшения тока ХХ) можно сделать вывод что в обычном режиме момент на валу все таки низкий и поэтому двигатель спокойно работает. Я подозреваю, что иногда возможны кратковременные скачки момента нагрузки (не знаю из-за чего, по технолгии виднее), при этом мицубиси отрабатывает их благодаря функции ограничения тока, которая кратковременно снижает частоту и не допускает опрокидывания. Нормальный частотник так и должен поступать.
У данфоса, судя по тому, что ток растет выше 4А функция ограничения тока действует слишком медленно, и поэтому ограничения тока не происходит. Когда начинается опрокидывание двигателя и снижение оборотов двигателя частотник уменьшает частоту медленнее, чем падают обороты у самого двигателя, при этом скольжение продолжает расти и ток быстро увеличивается. Тут похоже проблема именно в реализации функции ограничения тока у данфоса и это похоже не исправить.
Более чем уверен, что в этом все и дело, т.к. токи 1.7 А явно говорят о довольно низком моменте нагрузки, поэтому и мицубиси могут до 120 Гц работать.
Так что выход: снять данфос и поставить другой ПЧ, а также разобраться из-за чего в технологии могут возникать кратковременные скачки нагрузки.
Сообщение отредактировал fuel — 28.9.2007, 22:06
Kass
![]()
Просмотр профиля
Группа: Участники форума
Сообщений: 2841
Регистрация: 22.12.2006
Из: Москва
Пользователь №: 5301
Как увеличить скорость электродвигателя
механики подтвердили что да можно в 2 раза увеличить без проблем.
Да?
Двигатель 3000 на 100 Гц будет около 6000 об/мин. Болгарка столько крутит. Подшипники сколько проживут? А редуктор (не напрямую ведь двигатель подключен)?
Возникла необходимость увеличить производительность (скорость) конвейера, механики подтвердили что да можно в 2 раза увеличить без проблем.
Я думаю механики имели ввиду, что можно без проблем увеличить скорость именно конвейера, а не электродвигателя (во всяком случае за ЭД у нас отвечают электрики, а вот за конвейер уже механики). Конвейер то может быть и можно, а вот по двигателю читайте выше.
Мужики огромное спасибою В принципе понятно. Двигатель 3000 об/мин.
http://s5.postimage.org/u5o64e8kz/20150117_131531.jpg (http://postimage.org/image/u5o64e8kz/)
Механики естественно касательно конвейера дали добро на разгон только мехчасть. Крутануть конечно же попробуем. Всеравно редуктор спалим скорей всего, потому что редуктор червячный и сильно сомневаюсь что очень выдюжит повышенные обороты. Ну то не моя забота, просто главный механик решил выпендрится перед руководством, а потом всё началось, начали нас напрягать. Что либо объяснять бесполезно.
Еще такой вопрос.
Привезли машину Б/У, ну там куча всяких проблем, в том числе и по мехчасти.
В общем нужно запускать двигатель в режиме тяжелого пуска. Ток при запуске прыгает до 90А.
Двигатель 3кВт. После разгона двигатель выходит на свой режим и нормально крутится.
Поставили задачу переделать всю автоматику и если с контроллерами и прочьими заумностями проблем нет то с мотором есть.
На двигатель нацепили ПЧВ103-4К0-В. Привод не может раскрутить двигатель в режиме плавного разгона выдает ошибку «превышен предельный крутящий момент» код ошибки 12. Скорость пока не пробовали регулировать.
Как решить проблему?
Что либо объяснять бесполезно.
— а вот интересно . на Чернобыльской АЭС такая же ситуация была? :rolleyes:
Подумай, прежде чем руки запускать в оборудование, дружище, кому будешь объяснять — начальнику или прокурору? — Помощников намотать срок найдёшь легко — помощников смотать . вряд ли.
Крутите на любую частоту и не бойтесь за электричество, все — ОК! Ограничение существует в механической области — это подшипники. До 3000 об/мин нормально работают любые, при 5000 — 6000 оборотах обычные уже конкретно греются и могут клинить, поэтому замена на быстроходные, либо кратковременные выходы на данные скорости. Скорости 3000 — 4000 подсаживают ресурс в длительной переспективе. Да, и осторожнее с торможением — делать плавнее, ставить резисторы..
При тяжелых пусках — делайте разгон более плавным, смотрите (увеличивайте) настройку ограничения по току и по моменту (это разные параметры!) кроме того есть настройка допустимого времени перегрузки до срабатывания защиты. Обязательно точно указывайте параметры двигателя в настройках ПЧ и проводите автонастойку ПЧ на двигатель. Ни двигатель, ни ПЧ не выйдут из строя, возможна лишь тепловая интегральная перегрузка за счет плохого охлаждения и частых старт-стопов.
Векторные режимы — наше все! единственная причина не использовать вектор — это несколько двигателей включенных параллельно на один ПЧ. Есть правда еще одна — это когда производитель ПЧ сильно лукавит указывая наличие «векторного» режима для своих поделок, и называя «векторным» например, подъем момента в низких частотах.
Скорость регулировать нужно.
В том и проблема.
ПЧ — 4кВт двигатель — 3кВт.
С пускателей принципе двигатель запускается в допустимом режиме 7-8 Inom, на автоматическом выключателе стоит отсечка 10-12Inom, на нормальные обороты выходит за максимум 5-6 секунд. Запускается не часто.
Я в инструкции не нашел как регурилировать ток перегруза и время перегруза и ток отсечки.
Правильно ли я понимаю что скорость вращения ротора двигателя можно контролировать только энкодером. У нас есть привода которые могут контролировать скорость вращения ротора без энкодера, наверное не достаточно точно, но могут.
1. Для работы в «тяжелых» условиях ПЧ должен быть «больше» двигателя на следующий типоразмер(по мощности) , т.е для двигателя 3квт при тяжелых условиях надо брать ПЧ на 7.5 кВт. При этом надо настроить параметры двигателя правильно иначе ПЧ может движок «подпалить» , т.к настройки по умолчанию на макс.мощность.
2. Векторный режим для конвейера не нужен.
3. 100гц — крутится без нагрузки мотор будет , но. будет слышно , что ему не очень хорошо при этом . Занимался подобными экспериментами , уже при 80гц на реальной установке начинаются «проскальзывания» и «вибрация» железа электродвигателя . Поэтому 100гц — это так движок в холостую покрутить , посмотреть и. отказаться от этой затеи .