5 самых популярных схем регуляторов напряжения (РН) 0-220 вольт своими руками

Регулятор напряжения – это специализированный электротехнический прибор, предназначенный для плавного изменения или настройки напряжения, питающего электрическое устройство.
Важно помнить! Приборы этого типа предназначены для изменения и настройки питающего напряжения, а не тока. Ток регулируется полезной нагрузкой!
4 вопроса по теме регуляторов напряжения
- Для чего нужен регулятор:
а) Изменение напряжения на выходе из прибора.
б) Разрывание цепи электрического тока
- От чего зависит мощность регулятора:
а) От входного источника тока и от исполнительного органа
б) От размеров потребителя
- Основные детали прибора, собираемые своими руками:
а) Стабилитрон и диод
б) Симистор и тиристор
- Для чего нужны регуляторы 0-5 вольт:
а) Питать стабилизированным напряжением микросхемы
б) Ограничивать токопотребление электрических ламп
Ответы.
2 Самые распространенные схемы РН 0-220 вольт своими руками
Схема №1.
Самый простой и удобный в эксплуатации регулятор напряжения — это регулятор на тиристорах, включенных встречно. Это создаст выходной сигнал синусоидального вида требуемой величины.
СНиП 3.05.06-85
Входное напряжение величиной до 220в, через предохранитель поступает на нагрузку, а по второму проводнику, через кнопку включения синусоидальная полуволна попадает на катод и анод тиристоров VS1 и VS2. А через переменный резистор R2 производится регулировка выходного сигнала. Два диода VD1 и VD2, оставляют после себя только положительную полуволну, поступающую на управляющий электрод одного из тиристоров, что приводит к его открытию.
Важно! Чем выше токовый сигнал на ключе тиристора, тем сильнее он откроется, то есть тем больший ток сможет пропустить через себя.
Для контроля входного питания предусмотрена индикаторная лампочка, а для настройки выходного – вольтметр.
Схема №2.
Отличительная особенность этой схемы — замена двух тиристоров одним симистором. Это упрощает схему, делает ее компактней и проще в изготовлении.
СНиП 3.05.06-85
В схеме, также присутствует предохранитель и кнопка включения, и регулировочный резистор R3, а управляет он базой симистора, это один из немногих полупроводниковых приборов с возможностью работать с переменным током. Ток, проходя через резистор R3, приобретает определенное значение, оно и будет управлять степенью открытия симистора. После этого оно выпрямляется на диодном мосту VD1 и через ограничивающий резистор попадает на ключевой электрод симистора VS2. Остальные элементы схемы, такие как конденсаторы С1,С2,С3 и С4 служат для гашения пульсаций входного сигнала и его фильтрации от посторонних шумов и частот нерегламентированной частоты.
Как избежать 3 частых ошибок при работе с симистором.
- Буква, после кодового обозначения симистора говорит о его предельном рабочем напряжении: А – 100В, Б – 200В, В – 300В, Г – 400В. Поэтому не стоит брать прибор с буквой А и Б для регулировки 0-220 вольт — такой симистор выйдет из строя.
- Симистор как и любой другой полупроводниковый прибор сильно нагревается при работе, следует рассмотреть вариант установки радиатора или активной системы охлаждения.
- При использовании симистора в цепях нагрузок с большим потреблением тока, необходимо четко подбирать прибор под заявленную цель. Например, люстра, в которой установлено 5 лампочек по 100 ватт каждая будет потреблять суммарно ток величиной 2 ампера. Выбирая по каталогу необходимо смотреть на максимальный рабочий ток прибора. Так симистор МАС97А6 рассчитан всего на 0,4 ампера и не выдержит такой нагрузки, а МАС228А8 способен пропустить до 8 А и подойдет для этой нагрузки.
3 Основных момента при изготовлении мощного РН и тока своими руками
Прибор управляет нагрузкой до 3000 ватт. Построен он на использовании мощного симистора, а затвором или ключом его управляет динистор.
Динистор – это тоже, что и симистор, только без управляющего вывода. Если симистор открывается и начинает пропускать через себя ток, когда на его базе возникает управляющее напряжение и остается открытым пока оно не пропадет, то динистор откроется, если между его анодом и катодом появится разность потенциалов выше барьера открытия. Он будет оставаться незапертым, пока между электродами не упадет ток ниже уровня запирания.
СНиП 3.05.06-85
Как только на управляющий электрод попадет положительный потенциал, он откроется и пропустит переменный ток, и чем сильнее будет этот сигнал, тем выше будет напряжение между его выводами, а значит и на нагрузке. Что бы регулировать степень открытия используется цепь развязки, состоящая из динистора VS1 и резисторов R3 и R4. Эта цепь устанавливает предельный ток на ключе симистора, а конденсаторы сглаживают пульсации на входном сигнале.
2 основных принципа при изготовлении РН 0-5 вольт
- Для преобразования входного высокого потенциала в низкий постоянный используют специальные микросхемы серии LM.
- Питание микросхем производится только постоянным током.
Рассмотрим эти принципы подробнее и разберем типовую схему регулятора.
Микросхемы серии LM предназначены для понижения высокого постоянного напряжения до низких значений. Для этого в корпусе прибора имеется 3 вывода:
- Первый вывод – входной сигнал.
- Второй вывод – выходной сигнал.
- Третий вывод – управляющий электрод.
Принцип работы прибора очень прост – входное высокое напряжение положительной величины, поступает на входной выход и затем преобразуется внутри микросхемы. Степень трансформации будет зависеть от силы и величины сигнала на управляющей «ножке». В соответствии с задающим импульсом на выходе будет создаваться положительное напряжение от 0 вольт до предельного для данной серии.
СНиП 3.05.06-85
Входное напряжение, величиной не выше 28 вольт и обязательно выпрямленное подается на схему. Взять его можно с вторичной обмотки силового трансформатора или с регулятора, работающего с высоким напряжением. После этого положительный потенциал поступает на вывод микросхемы 3. Конденсатор С1 сглаживает пульсацию входного сигнала. Переменный резистор R1 величиной 5000 ом задает выходной сигнал. Чем выше ток, который он пропускает через себя, тем выше больше открывается микросхема. Выходное напряжение 0-5 вольт снимается с выхода 2 и через сглаживающий конденсатор С2 попадает на нагрузку. Чем выше емкость конденсатор, тем ровнее оно на выходе.
Регулятор напряжения 0 — 220в
Топ 4 стабилизирующие микросхемы 0-5 вольт:
- КР1157 – отечественная микросхема, с пределом по входному сигналу до 25 вольт и током нагрузки не выше 0.1 ампер.
- 142ЕН5А – микросхема с максимальным выходным током 3 ампера, на вход подается не выше 15 вольт.
- TS7805CZ – прибор с допустимыми токами до 1.5 ампер и повышенным входным напряжением до 40 вольт.
- L4960 – импульсная микросхема с максимальным током нагрузки до 2.5 А. Входной вольтаж не должен превышать 40 вольт.
РН на 2 транзисторах
Данный вид применяется в схемах особо мощных регуляторов. В этом случае ток на нагрузку также передается через симистор, но управление ключевым выводом происходит через каскад транзисторов. Это реализуется так: переменным резистором регулируется ток, который поступает на базу первого маломощного транзистора, а тот через коллектор-эмиторный переход управляет базой второго мощного транзистора и уже он открывает и закрывает симистор. Это реализует принцип очень плавного управления огромными токами на нагрузке.
СНиП 3.05.06-85
Ответы на 4 самых частых вопроса по регуляторам:
- Какое допустимое отклонение выходного напряжения? Для заводских приборов крупных фирм, отклонение не будет превышать +-5%
- От чего зависит мощность регулятора? Выходная мощность напрямую зависит от источника питания и от симистора, который коммутирует цепь.
- Для чего нужны регуляторы 0-5 вольт? Эти приборы чаще всего используют для питания микросхем и различных монтажных плат.
- Зачем нужен бытовой регулятор 0-220 вольт? Они применяются для плавного включения и выключения бытовых электроприборов.
4 Схемы РН своими руками и схема подключения
Коротко рассмотрим каждую из схем, особенности, преимущества.
Схема 1.
Очень простая схема для подключения и плавной регулировки паяльника. Используется, чтобы предотвратить разгорание и перегрев жала паяльника. В схеме используется мощный симистор, которым управляет цепочка тиристор-переменный резистор.
Схема 2.
Схема основанная на использовании микросхемы фазового регулирования типа 1182ПМ1. Она управляет степенью открытия симистора, который управляет нагрузкой. Применяются для плавного регулирования степени светимости лампочек накаливания.
Схема 3.
Простейшая схема регулирования накалом жала паяльника. Выполнена по очень компактной схеме с использованием легкодоступных компонентов. Управляет нагрузкой один тиристор, степень включения которого регулирует переменный резистор. Также присутствует диод, для защиты от обратного напряжения.
СНиП 3.05.06-85
Схема 4.
Схема, предназначенная для управления уровнем освещения в комнате. Может регулировать степень накала лампочки. Выполнена на основе одного тиристора, который управляется диммером. Поворотом ручки резистора, изменяется воздействие на ключевой вывод тиристора, что изменяет его пропускную способность по электрическому току.
СНиП 3.05.06-85
Китайский РН на 220 вольт
В наше время товары из Китая стали довольно популярной темой, от общей тенденции не отстают и китайские регуляторы напряжения. Рассмотрим самые популярные китайские модели и сравним их основные характеристики.
| Название | Мощность | Напряжение стабилизации | Цена | Вес | Стоимость одного ватта |
| Module ME | 4000 Вт | 0-220 В | 6.68$ | 167 г | 0.167$ |
| SCR Регулятор | 10 000 Вт | 0-220 В | 12.42$ | 254 г | 0.124$ |
| SCR Регулятор II | 5 000 Вт | 0-220 В | 9.76$ | 187 г | 0.195$ |
| WayGat 4 | 4 000 Вт | 0-220 В | 4.68$ | 122 г | 0.097$ |
| Cnikesin | 6 000 Вт | 0-220 В | 11.07$ | 155 г | 0.185$ |
| Great Wall | 2 000 Вт | 0-220 В | 1.59$ | 87 г | 0.080$ |
Существует возможность выбрать любой регулятор именно под свои требования и необходимости. В среднем один ватт полезной мощности стоит менее 20 центов, и это очень выгодная цена. Но все же, стоит обращать внимание на качество деталей и сборки, для товаров из Китая она по-прежнему остается очень низким.
Как регулировать мощность переменного тока
Решил как-то отец собрать для дачи некое устройство, в котором, по его заверению, можно будет варить сыр. Устройство сие вид имело могучий и представляло из себя железный короб, подозрительно напоминающий старую стиральную машинку. Внутрь короба (все также добротно!) были вмонтированы три тэна по 1700 Ватт каждый. В общем сыра должно было хватить на небольшой посёлок.
Изделие (внешне выглядящее как что-то из безумного макса), должно быть весьма технологичным и поддерживать заданную температуру в максимально узких пределах. Для этого рядом появилась ещё одна коробка с симисторами, к которым подключались ТЭНы и схема, выдающая высокий уровень при переходе синусоиды через ноль. А у меня появился интересный проект.
Итак нам нужно выходить на заданную температуру и поддерживать её, с этим должен справляться алгоритм ПИД регулятора. Глубоко вдаваться в его работу не буду, скажу лишь что он получает на вход текущую ошибку, а на выходе выдает какое-то число в заданных пределах. У меня таким числом будет мощность выдаваемая на ТЭН, хотя в принципе, это может быть любой инерционный процесс, например обороты двигателя. Что важно для ПИД регулятора, это чтобы выходная величина производила воздействие линейно. Поэтому попробуем разобраться в способах регулировки мощности и их линейности.
Как вообще регулируется мощность?
Мощность — это произведение силы тока на напряжение. Если представить это произведение графически, то для постоянного тока, это будет площадь прямоугольника со сторонами равными напряжению и току

Так как при постоянном сопротивлении и напряжении ток тоже будет постоянным, то заменим ось тока на ось времени. Сопротивление я беру постоянным для объяснения принципа регулирования.
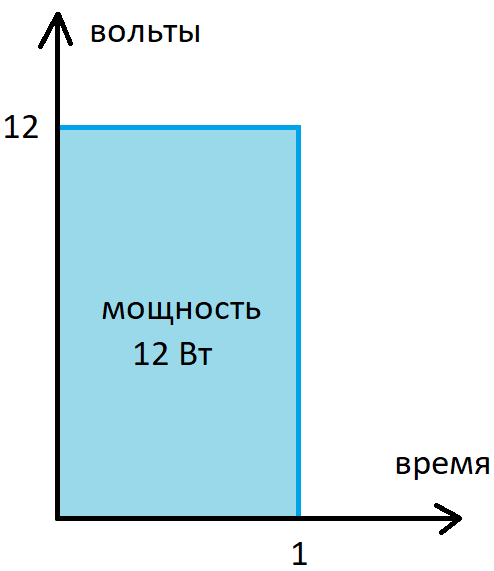
Тогда при заданном напряжении (12 В) и сопротивлении в 12 Ом, по закону Ома: I=U/R, получаем ток равный 1 А, и соответственно мощность за единицу времени будет равна 12 Вт. При другом сопротивлении мощность, естественно тоже изменится.
Теперь, если мы хотим регулировать мощность за единицу времени, нам нужно как-то изменять площадь фигуры за единицу времени. Самым чистым способом будет просто изменять напряжение, тогда и мощность будет пропорционально изменяться. Но контроллер, как и любые цифровые устройства, не умеет плавно изменять напряжение на ножках, он может либо «поднимать» их до высокого уровня, либо «опускать» до низкого уровня. Этот недостаток он компенсирует скоростью, даже самый дохленький современный МК может работать на частотах в миллионы тактов в секунду. Чтобы регулировать мощность, контроллер будет очень быстро «дрыгать» ножкой, тем самым изменяя результирующая площадь импульса за единицу времени.

На этом принципе устроена широтно-импульсная модуляция, она же ШИМ. Изменяя время (ширину) импульса за период мы изменяем выдаваемую мощность. На рисунке выше, показано два периода ШИМа. Каждый период имеет отношение площади импульса к площади всего периода 0.5, те половину времени периода контроллер выдает высокий уровень сигнала, другую половину низкий. Отношение времени высокого уровня сигнала к времени низкого называется скважностью. Красная линия на графике отражает результирующую мощность за единицу времени, по ней видно что при скважности 0.5 мощность также упала на половину (с 12 до 6 Вт). Хорошая новость состоит в том, что, ШИМ в контроллерах реализован аппаратно. Так что для регулирования чего-то достаточно его запустить и, по необходимости, изменять скважность.
Для постоянного тока, режим ШИМа оптимален, причем чем более инерционный прибор мы к нему подключаем, тем меньшую частоту ШИМа можно использовать. Для большого ТЭНа достаточно чуть ли не одного герца, а вот для светодиодов лучше использовать частоту побольше. Кстати частота ШИМа в подсветке экрана ноутбука, зачастую оказывается чуть ли не решающим фактором при покупке, так как, при слишком низкой частоте, глаза будут быстро уставать.
Если попробовать провернуть трюк с ШИМом для переменного напряжения, мы увидим что все сломалось и мощность перестала регулироваться линейно

одинаковые промежутки времени стали давать нам разную площадь, а значит разную мощность. Однако, если разбить полученные отрезки на на ещё более мелкие, то процентное соотношение ширины импульса к ширине кусочка будет выравниваться.
Если мы возьмем равный процент выдаваемой мощности от каждого кусочка, в результате мы получим такой же процент, от мощности всей волны, а на выходе мы получим линейный регулятор мощности для переменного тока. Причем чем большую частоту будет иметь ШИМа, тем на большее количество кусочков он разобьет синусоиду, а значит мы получим большую линейность.
Это было бы решением всех проблем, но в моем случае устройством коммутировавшим нагрузку был не быстрый транзистор, а симистор — медленный прибор, с максимальными рабочими частотами в пределах нескольких сотен герц, к тому же симистор можно только открыть, закроется он сам при переходе через ноль. На таких частотах управлять переменным напряжением которое имеет частоту 50 Гц, линейно не получится. Поэтому здесь нужно использовать какой-то другой подход и как раз для него, помимо симисторов, была установлена схема перехода через ноль.
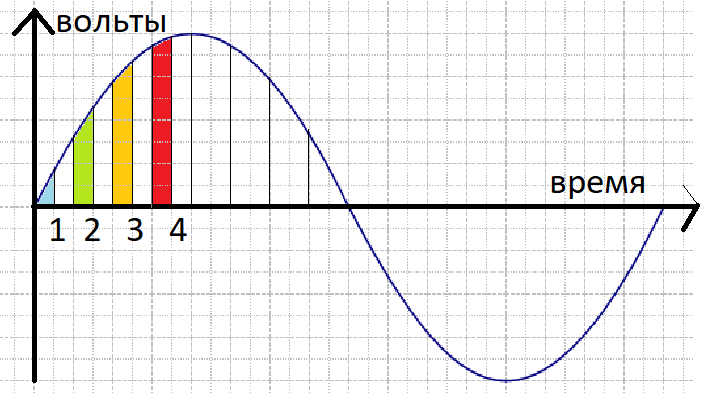
В случае с симисторами лучше разбить синусоиду на куски с одинаковыми площадями и записать время каждого такого кусочка в таблицу. Тогда каждое последующее значение из таблицы будет линейно увеличивать мощность.

На графике выше полуволна синусоиды разбита на части разные по времени, но имеющие одинаковую площадь, а значит несущие в себе одинаковую мощность. Все что нам останется сделать это загрузить таблицу с временными интервалам в наш котроллер, синхронизировать какой-то из его таймеров с частотой синусоиды, для этого используется схема перехода через ноль, и просто брать из таблички нужное значение, в течении которого будет высокий уровень. Суть метода похожа на ШИМ, но немного доработанный и синхронизированный с источником переменного напряжения.
Расчёт таблицы мощности
Теперь можно перейти непосредственно к расчёту.
Изначально задача заключается в том чтобы разбить синусоиду на нужное нам количество кусочков, каждый из которых будет иметь одинаковую площадь. На этом моменте, обычно проступает холодный пот, так-как площадь под графиком это и есть геометрическое определение интеграла. Соответственно нам нужно будет взять интеграл от функции при этом определить такие пределы интегрирования, которые будут давать одинаковый результат. Затем (как будто расчёта интегралов мало!) полученные пределы нужно будет перевести во время задержки (время в течении которого будет сохранятся высокий уровень). После чего полученное время перевести в понятное для контроллера число — количество тиков таймера. Звучит страшно, а по факту сейчас разберёмся:
Во первых сама функция — как было написано выше мощность это произведение тока на напряжение, для переменного тока (без сдвига фаз), это утверждение также верно, но, так-как и ток и напряжение меняются со временем P=IU превращается в P=I*sin(t) * U*sin(t). Так как амплитуда синусоиды нас сильно не волнует, уравнение вырождается до P=sin^2(t).
Неопределённый интеграл от квадрата синуса
Теперь нужно подобрать пределы для определенных интегралов. Выберем, насколько частей мы хотим разбить нашу синусоиду: я выбрал сто, чтобы можно было регулировать мощность с шагом в 1%.
Итак мы нашли чему будет равен неопределённый интеграл и даже выбрали шаг. Теперь нужно подобрать пределы интегрирования. Смысл их подбора заключается в том, чтобы значение определенного интеграла было постоянным при их смене. Напомню, что неопределенный интеграл это формула, а определённый вполне конкретное число. Определённый интеграл считается по формуле:

То есть мы берем неопределённый интеграл, подставляем в него верхнее число, затем нижнее, и вычитаем второе из первого.
Наш неопределённый интеграл является смешанной тригонометрической функцией, а значит не имеет общего аналитического решения. Чаще всего такие функции решаются либо числовыми, либо графическими методами. Графический метода заключается в том что мы строим графики для правой и левой части уравнения их пересечение будет решением уравнения. На рисунке показано решение уравнения для 0.2

Наряду с графическим методом можно использовать численный, то есть подбор решения. Будем подставлять в неопределённый интеграл числа до тех пор пока не найдём решение). Можно использовать лист и бумажку чтобы попрактиковаться в математике, можно онлайн калькулятор, я же буду использовать Python и библиотеки numpy:
Отлично мы получили массив чисел (пределов интегрирования!), валидность этих чисел можно проверить подставив их в интеграл. В результате должна получится площадь равная выбранному шагу! Теперь, если подставить полученные числа на график мощности, должна получится следующая картина:

Если все сошлось, то можно двигаться дальше и задать получившимся числам размерность времени, потому что сейчас они в радианах. Чтобы это сделать нужно выяснить угловую скорость, для частоты сети, то есть количество радиан в секунду.
Тогда узнаем сколько сколько длится одна радиана
Теперь, значения задержек в радианах, превратим во время, умножив каждое значение на период радианы (T). Проверим ход своей мысли: действительно-ли получится время задержки, если умножить задержку, на период? Задержка имеет размерность радиан, период — секунд за радиану, мы хотим их перемножить. Тогда рад * ( сек / рад ) = сек. Мы получили время, а значит ход мыслей должен быть верным.
Для расчётов я опять предпочту python:
На этом моменте мы получили универсальную таблицу задержек, теперь необходимо конвертировать её специально под микроконтроллер.
Расчёт таймера МК и перевод таблицы
Время необходимо перевести в понятную для МК величину — количество переполнений таймера. Но сначала необходимо определится с частотой таймера: чем выше частота, тем точнее он будет отмерять время, но с другой стороны, тем меньше времени будет оставаться на выполнение остальной программы. Здесь необходимо найти золотую середину.
Для определения минимально допустимой частоты таймера, надо найти числа в массиве с минимальной разностью между ними. Разность тем меньше, чем ближе в максимуму синусоиды мы двигаемся. Тогда возьмем задержку при которой синусоида достигает единицы и число перед ним, после чего найдем их разность:
5 мс — 4.9363 мс = 0.0636 мс
Получившееся число является максимально допустимым периодом между прерываниями таймера, тогда через него найдём минимально допустимую частоту
1 / 0.0636 = 15 КГц
Значит для заданной точности в 1% будет достаточно таймера с частотой 15КГц. Частота МК составляет 16 МГц, значит между прерываниями будет 1000 тактов процессора, этого достаточно для выполнения остальной части программы, так что можно смело настраивать таймер на заданную частоту.
Для настройки таймера на определенную частоту, не кратную тактирующей используется режим таймера CTC — Clear Timer on Compare. В этом режиме таймер досчитывает до заданного числа и сбрасывается, после чего операция повторяется. Число при котором будет происходить совпадение считается по формуле
Число = Тактовая частота МК / предделитель таймера / выбранная частота
Частота выбрана, теперь нужно перевести таблицу в тики таймера. Делать я это буду опять на Python
В общем-то на этом весь расчёт окончен, остается только отзеркалить получившийся массив для второй половины полуволны и загрузить в МК. Далее по прерыванию от синхроимпульса, нужно подать низкий уровень, на ножку управления симистором, запустить таймер и считать его переполнения (совпадения, тк. у нас режим CTC). Как только количество переполнений достигнет нужного числа из таблички, подаем высокий уровень на управляющую ножку. На этом линейный регулятор мощности переменного напряжения готов!
Заключение
Надеюсь статья была понятна и её было интересно читать. В дополнение хотелось бы сказать, сигнал перехода через ноль не приходит идеально вовремя, поэтому может потребоваться дополнительная коррекция, чтобы это исправить.
Код расчетов на python
Также, если кому-то будет интересно, могу поделится исходником готового регулятора для ардуино.
Электронный регулируемый «трансформатор» постоянного и переменного тока
Приведена схема аналогового устройства, позволяющего имитировать работу трансформатора тока с плавно регулируемым коэффициентом трансформации. Электронный регулируемый «трансформатор» способен трансформировать входной постоянный или переменный ток, в том числе относительно высокой частоты в выходной постоянный или переменный ток.
Трансформатором, как известно, называют электрический прибор, посредством которого преобразуют переменное напряжение или ток одного уровня в переменное напряжение или ток другого уровня. Отношение напряжения или тока на входе трансформатора к напряжению или току на его выходе носит название «Коэффициент трансформации». В соответствии с коэффициентом трансформации, насколько повышается (понижается) напряжение на выходе трансформатора относительно входа, во столько же раз понижается (повышается) ток на выходе трансформатора. Во всех случаях соблюдается закон сохранения энергии: коэффициент полезного действия трансформатора не может достигать 100%.
Обычный трансформатор способен работать только на переменном токе, и его коэффициентом трансформации управлять плавно крайне затруднительно.
Электронный регулируемый «трансформатор», Рисунок 1, способен трансформировать входной постоянный или переменный ток, в том числе относительно высокой частоты, в выходной постоянный или переменный ток с плавно регулируемым коэффициентом трансформации, причем коэффициент трансформации может быть как больше, так и меньше единицы.
| Рисунок 1. | Электронный регулируемый «трансформатор». |
Полярность и величина входного тока задаются потенциометром R1. Кроме того, при неизменной полярности величину входного тока можно плавно регулировать потенциометром R2. Резистор R3 служит для ограничения максимальной величины входного тока. Резистор R4 служит датчиком тока. Активная часть «трансформатора» выполнена на микросхеме TL084 (DA1.1, DA1.2).
Нагрузками операционных усилителей служат резисторы R6 и R9, причем R6 = R7 = R8 = R9. Коэффициент трансформации тока k плавно регулируется потенциометром R5 (k = R5/R6; при R5 = 20 кОм и R6 = 1 кОм k = 20). Коэффициент трансформации тока k может принимать значения и меньше единицы, например, при R5 = 200 Ом и R6 = 1 кОм k = 0.2. Направление электрического тока в резисторе R9 обратно направлению электрического тока в резисторе R6.
Максимальный выходной ток «трансформатора» ограничен нагрузочной способностью операционных усилителей, напряжением питания, а также величиной нагрузочных сопротивлений. Величину этого тока можно увеличить за счет применения транзисторных выходных каскадов. Коэффициент полезного действия «трансформатора», разумеется, далек от 100%.
Электронные регулируемые «трансформаторы» постоянного и переменного тока могут быть использованы в измерительной, усилительной и преобразовательной технике.





