Регулирование частоты вращения асинхронного электродвигателя
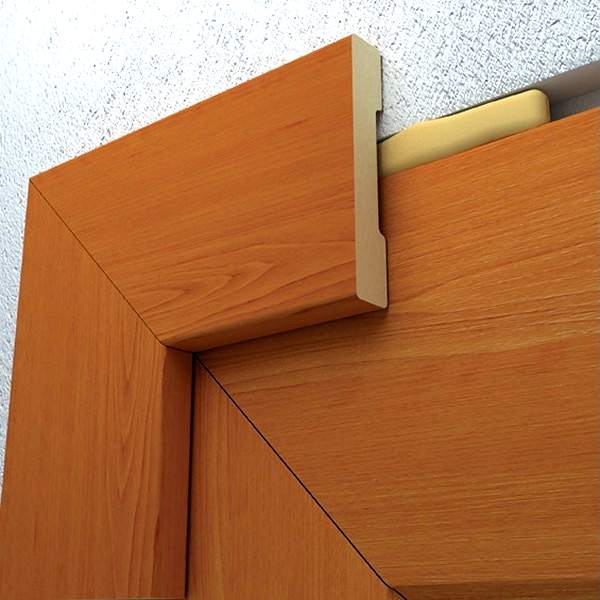
Рисунок 1. Асинхронный двигатель Асинхронный двигатель (рис. 1) имеет неподвижную часть, которая называется статор, и вращающуюся часть, именуемую ротором. Магнитное поле создается в обмотке, размещенной в статоре. Такая конструкция электродвигателя позволяет регулировать частоту его вращения различными способами.
Основные технические характеристики, учитываемые при изменении частоты вращения
При регулировании частоты вращения асинхронных электродвигателей следует учитывать несколько основных технических показателей, которые в значительной мере влияют на процесс работы двигателей.
- Диапазон регулирования Д, то есть предел, до которого возможно изменять частоту вращения. Эта характеристика вычисляется по соотношению минимальной и максимальной частоты вращения.
- Плавность регулирования — определяется по минимальному скачку частоты вращения электродвигателя, когда осуществляется переход одной механической характеристики на другую.
- Направление изменения частоты вращения двигателя (так называемая зона регулирования). Номинальные условия работы определяют естественную механическую характеристику двигателя. Когда осуществляется процесс регулирования частоты вращения, эти характеристики (напряжение и частота питающей сети) начнут изменяться. В результате получаются искусственные характеристики, которые обычно ниже естественных.
Есть несколько способов регулирования частоты вращения электродвигателя:
Регулирование частоты вращения изменением частоты питающей сети
Регулирование частоты вращения путем изменения частоты в питающей сети считается одним из самых экономичных способов регулирования, который позволяет добиться отличных механических характеристик электропривода. Когда происходит изменение частоты питающей сети, частота вращения магнитного поля также меняется.
Преобразование стандартной частоты сети, которая составляет 50 Гц, происходит за счет источника питания. Одновременно с изменением частоты происходит и изменение напряжения, которое необходимо для обеспечения высокой жесткости механических характеристик.
Регулирование частоты вращения позволяет добиться различных режимов работы электродвигателя:
- с постоянным вращающим моментом;
- с моментом, который пропорционален квадрату частоты;
- с постоянной мощностью на валу.
В качестве источника питания для регулирования могут использоваться электромашинные вращающиеся преобразователи, а также статические преобразователи частоты, которые работают на полупроводниковых приборах, серийно выпускающихся промышленностью.
Несомненным преимуществом частотного регулирования является наличие возможности плавно регулировать частоту вращения в обе стороны от естественной характеристики. При регулировании достигается высокая жесткость характеристик и отличная перегрузочная способность.
Регулирование частоты вращения изменением числа полюсов
Регулирование частоты вращения путем изменения числа полюсов происходит за счет изменения частоты вращения магнитного поля статора. Частота питающей сети остается неизменной, в то время как происходит изменение частоты вращения магнитного поля и частоты вращения ротора. Они меняются обратно пропорционально числу полюсов. Например, число полюсов равно 2, 4, 6, 8, тогда обороты двигателя при изменении их количества будут составлять 3000, 1500, 1000, 750 оборотов в минуту.
Двигатели, которые обеспечивают переключение числа пар полюсов, имеют обычно короткозамкнутый ротор с обмоткой. Благодаря этому ротору обеспечивается возможность работы двигателя без дополнительных пересоединений в цепи.
Изменение частоты вращения включением в цепь ротора с реостатом
Еще одним способом изменения частоты вращения двигателя является включение в цепь ротора с реостатом. Такой метод имеет существенное ограничение, так как может быть применен только для двигателей с фазным ротором. Он обеспечивает плавное изменение частоты вращения в очень широких пределах. Минусом же являются большие потери энергии в регулировочном реостате.
Изменение направления вращения
Изменение направления вращения двигателя может быть осуществлено за счет изменения направления вращения магнитного поля, которое создается обмотками статора. Изменение направления вращения можно достичь, изменив порядок чередования тока в фазах обмотки статора.
Cпособы регулирования скорости вращения асинхронного двигателя

Асинхронные двигатели переменного тока являются самыми применяемыми электродвигателями абсолютно во всех хозяйственных сферах. В их преимуществах отмечается конструктивная простота и небольшая цена. При этом немаловажное значение имеет регулирование скорости асинхронного двигателя. Существующие способы показаны ниже.
Согласно структурной схеме скоростью электродвигателя можно управлять в двух направлениях, то есть изменением величин:
- скорость электромагнитного поля статора;
- скольжение двигателя.
Первый вариант коррекции, используемый для моделей с короткозамкнутым ротором, осуществляется за счет изменения:
- частоты,
- количества полюсных пар,
- напряжения.
В основе второго варианта, применяемого для модификации с фазным ротором, лежат:
- изменение напряжения питания;
- присоединение элемента сопротивления в цепь ротора;
- использование вентильного каскада;
- применение двойного питания.
Вследствие развития силовой преобразовательной техники на текущий момент в широком масштабе изготовляются всевозможные виды частотников, что определило активное применение частотно-регулируемого привода. Рассмотрим наиболее распространённые методы.
Частотное регулирование
Всего десять лет назад в торговой сети регуляторов частоты вращения скорости ЭД было небольшое количество. Причиной тому служило то, что тогда ещё не производились дешёвые силовые высоковольтные транзисторы и модули.
На сегодня частотное преобразование – самый распространённый способ регулирования скорости двигателей. Трёхфазные преобразователи частоты создаются для управления 3-фазными электродвигателями.
Однофазные же двигатели управляются:
- специальными однофазными преобразователями частоты;
- 3-фазными преобразователями частоты с устранением конденсатора.
Схемы регуляторов оборотов асинхронного двигателя
Для двигателей повседневного предназначения легко можно выполнить необходимые расчеты, и своими руками произвести сборку устройства на полупроводниковой микросхеме. Пример схемы регулятора электродвигателя приведён ниже. Такая схема позволяет добиться контроля параметров приводной системы, затрат на техническое обслуживание, снижения потребления электричества наполовину.
Принципиальная схема регулятора оборотов вращения ЭД для повседневных нужд значительно упрощается, если применить так называемый симистор.
Обороты вращения ЭД регулируются с помощью потенциометра, определяющего фазу входного импульсного сигнала, открывающего симистор. На изображении видно, что в качестве ключей применяются два тиристора, подключённых встречно-параллельно. Тиристорный регулятор оборотов ЭД 220 В достаточно часто применяется для регулирования такой нагрузки, как диммеры, вентиляторы и нагревательная техника. От оборотов вращения асинхронного ЭД зависят технические показатели и эффективность работы двигательного оборудования.
Заключение
На технорынке сегодня предлагаются в большом ассортименте регуляторы и частотные преобразователи для асинхронных электродвигателей переменного тока.
Управление способом варьирования частоты на данный момент – самый оптимальный способ, т. к. он позволяет плавно регулировать скорость асинхронного ЭД в широчайшем диапазоне, без значительных потерь и снижения перегрузочных способностей.
Тем не менее, на основе расчёта, можно самостоятельно собрать простое и эффективное устройство с регулированием оборотов вращения однофазных электродвигателей с помощью тиристоров.
Регулирование оборотов асинхронного двигателя: несколько способов изменения скорости
Асинхронные двигатели (они же АД) довольно популярны среди современных технических средств из-за простой сборки и надёжности в работе. Многие станки и заводское оборудование сегодня оснащены именно такими электрическими двигателями.
Скорость вращения асинхронного двигателями производится разными способами, иногда механически с нагрузкой на вал, а иногда электрической регулировкой (у которой есть своим плюсы и минусы).
Чаще всего выбирают электрическое управление. Такое управление возможно благодаря силе тока, уровню напряжения в сети и частоте тока, которые влияют на работу электрического двигателя.
Сегодня мы расскажем о самых востребованных способах регулирование вращения асинхронного двигателя.
Асинхронный привод с ротором и регулирование оборотов
Есть два способа регулирования числа оборотов:
- Регулирование магнитного поля статора, где благодаря изменению числа пар плюсов можно управлять вращением;
- Регулирование напряжение, благодаря чему происходит изменение скольжения электрического мотора, и появляется возможность управления вращением.
Регулирование оборотов асинхронного привода
В этом способе регулирование возможно благодаря подключению к асинхронному электрическому двигателю специального аппарата для изменения частот. Делается это с помощью преобразователей. Более наглядно действие процесса можно увидеть на этой формуле:
Для сохранения магнитного потока, который в свою очередь сохраняет перегрузочную способность электрического мотора, нужно в одно время следить за уровнями частоты и напряжения. В виде формулы это выглядит так:
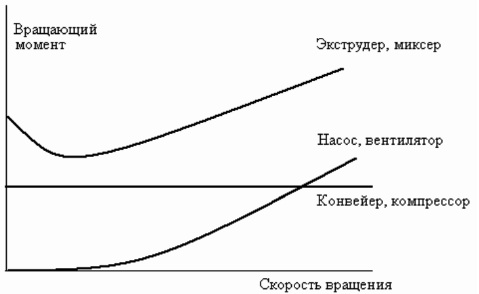
Критический момент не будет изменён. Другие характеристики можно увидеть на картинке ниже, и если Вы не понимаете, что означают эти характеристики, лучше не применять этот способ самостоятельно.
Плюсам способа: мягкость регулировки, возможность менять скорость оборотов, строгая неизменность характеристик и возможность сэкономить.
Минус следующий: нужен частотный преобразователь, из-за которого стоимость всего механизма возрастёт. Кстати, сегодня можно купить устройства на одну и на три фазы менее, чем за 150 долларов. Это хорошая цена за полноценный контроль.
Регулирование количества пар плюсов асинхронного привода
Применим для асинхронных двигателей с высокой скоростью и сложной обмоткой, которая и помогает изменять пары плюсов. Скорости двигателя могут быть разными, принцип контроля рассмотрим на двигателе с двумя скоростями.
В таком устройстве все фазы содержат две половинчатые обмотки. Вращение изменяется в зависимости от того, каким способом они подключены к двигателю.
В двигателях на четыре скорости обмотка выглядит как разрозненные детали. Когда количество пар меняет, скорость оборотов уменьшаются вполовину. Вторая обмотка будет действовать по такому же принципу.
Критический момент изменяется вместе с количеством пар. Чтобы он не менялся, нужно одновременно с изменением количества пар осуществлять контроль напряжение (может помочь переключать звезды-треугольника или иные варианты).
Плюсы такого варианта заключаются в высоком коэффициенте полезного действия и неизменным характеристикам двигателя.
Минус же выражается в ступенчатом регулировании, большом весе устройств, и электрический мотор обойдётся значительно дороже.
Двигатели с ротором на фазу и регулирование их скорости оборотов
При этих способах используют изменение скольжения, но варианты тоже могут быть разными.
Регулировка напряжения
Асинхронный двигатель подключается с помощью автотрансформатора. При уменьшении напряжения число оборотов, соответственно, станет меньше.
Этот вариант уменьшит перегрузочную способность асинхронного движка. Изменять напряжение можно только в пределах допустимого значения, поскольку выход из этого значение приведёт к поломке электрического двигателя.
Контроль сопротивления в роторе
Этот вариант подразумевает подключение резисторов к ротору. Это поможет плавно увеличить сопротивление.
Скольжение при этом вырастет, а скорость вращения, наоборот, станет ниже.
Плюсом является широкий диапазон регулирования с позиции уменьшения скорости оборотов.
Минусы: низкий коэффициент полезного действия и нестабильные механические характеристики.
Контроль с помощью двойной подпитки
Изменяется скольжение, влияющее на количество оборотов в промежуток времени, хотя скорость магнитного поля не изменится. Энергия в такой цепи будет подаваться на обмотки. Сам контроль произойдёт посредством силы скольжения, трансформированного в ротор с добавочной электродвижущей силой.
Такой вариант применим для габаритных машин с самыми мощными двигателями.
Мягкий старт начала работы
У АД есть свои минусы. Например, старт начинается слишком резко, что может привести к поломке в случае, если пусковой ток превысит значение напряжения.
Для того чтобы начать работу более медленно, есть разные варианты:
- обмотки переключаются по принципу звезды-треугольника;
- начать работу можно через автоматический трансформатор;
- для запуска используют специальные устройства.
Сегодня на многих регуляторах частоты присутствует возможность медленного начала раскрутки. Пусковой ток снизится вместе с общей нагрузкой на АД. Частота и начало работы тесно связаны друг с другом.
Самостоятельное создание устройства контроля вращения
Для двигателей на одну фазу с небольшой мощностью можно использовать приборы изменения электрической мощности. Плюсы такого варианта в надёжности, а минусы заключаются в низком коэффициенте полезного действия, перегреве двигателя и полного отключения асинхронного двигателя.
По схеме ниже можно сконструировать устройство контроля для мощности, не превышающей 500 Вт, при этом скорость оборотов можно увеличить в четыре раза.
В цепи есть генератор, частота которого не меняется. Он собран из мультивибратора, счётчика и полумоста. Есть специальный трансформатор, выполняющий разводку транзисторов.
В цепи С4 можно увидеть, как R7 останавливает скачки напряжения, чтобы сохранить работу транзисторов VT. Напряжение цепи удваивается выпрямителем, конструкция которого подразумевает мост, где напряжение увеличивается.
Жилы обмоток рассчитаны на мощность в 12 В. Первая обмотка трансформатора включает сто двадцать витков, сечение провода 0,7 миллиметров, провод отведён от середины. Вторая, включающая две обмотки в совокупности на сто двадцать витков, обладает той же толщиной сечения.
Важно! Обмотка, следующая второй, должна быть хорошо изолирована из-за большой разницы потенциала. В противофазе происходит соединение затворов ключей и выходных обмоток.
Это всё, что нужно знать о способах регулировки оборотов электрических двигателей. Надеемся, что благодаря этой информации Вы сможете подобрать тот вариант регулировки, который подойдёт именно вашему двигателю!
Частотное регулирование асинхронного двигателя

Unfortunately, you are using an outdated browser. Please update your browser to improve performance, quality of the displayed material, and improve security.
- транспортеров;
- насосного оборудования;
- вентиляторов и другой техники
Преимущества
Электрический привод постоянного тока не отличается особой надежностью: во время эксплуатации имеет место искрение щеток, что быстро изнашивает коллектор. Во взрывоопасной среде или запыленных помещениях такое устройство использовать нельзя. К тому же его цена остается довольно внушительной.
- проще в плане конструкции;
- дешевле стоит;
- более надежен, потому что не имеет подвижных контактов;
- меньше по размеру при аналогичной мощности (проще установить, легче спланировать систему);
- легче.
Два важных преимущества асинхронных двигателей – их простое производство и неприхотливость по части обслуживания. Есть, правда, и недостатки, к которым относится сложность организации изменения скоростных характеристик электродвигателя. Здесь не подходят классические решения – изменение напряжения через дополнительные сопротивления в цепи обмоток.
Хотя теория частотного регулирования разработана еще в 30-е годы XX века, реализовать управление асинхронным электродвигателем с помощью регулятора частоты до недавнего времени было сложно. Причина – высокая стоимость производства и (соответственно) продажи преобразователей частоты.
Ситуация изменилась с появлением схем с IGBT-транзисторами (БТИЗ, биполярные транзисторы с изолированным затвором, производительные микропроцессорные системы). На их базе производителям из Японии, Европы и США удалось снизить стоимость изготовления частотного преобразователя, не теряя в его технических характеристиках.
Виды управления скоростями
Существует несколько видов управления асинхронным электродвигателем, среди которых самым распространенным в последние годы стал метод векторного или векторного бездатчивокового регулирования скорости. Он нередко встречается в частотном преобразователе, который изначально применяет скалярное управление без клемм для присоединения датчика скорости.
Собственно, вид регулирования асинхронного двигателя частотным преобразователем , зависит от класса последнего. А делят регуляторы частоты по нескольким признакам.
- По типу управления – на устройства ручного и автоматического регулирования.
- В зависимости от вида выходной нагрузки частотный преобразователь делится по способу исполнения:
- на устройства для электроприводов насосного и вентиляторного оборудования;
- механизмы для привода общепромышленного назначения;
- частотные преобразователи для электродвигателей, которые эксплуатируются в сложных условиях (с перегрузками).
Частотные преобразователи последних поколений, кроме разных по исполнению вариаций, могут иметь еще и разный набор функций. К последним относятся 2 вида управления (ручной и автоматический) скоростью вращения и его направлением, потенциометр на основной панели, система настройки диапазонов выходных частот (0–800 Гц).
Принцип
Задачи частотника в системе частотного регулирования асинхронного электродвигателя:
- изменение показателей электродвигателя в автоматическом режиме через обработку сигналов с датчиков, установленных на периферии;
- приведение привода в действие, согласно настройкам (программируемый алгоритм работы по времени);
- поддержание функции автоматического восстановления первоначальных настроек работы в случаях кратковременных остановок (прерываний питания);
- удаленное управление переходными процессами с пульта; от перегрузок.
Принцип частотного регулирования асинхронного двигателя выражен в формуле:
Его суть: изменяя частоту f1 питающего напряжения, можно менять угловую скорость магнитного поля статора при неизменном количестве пар полюсов, обозначенных в формуле p. Такой метод обеспечивает оптимальные характеристики работы асинхронного электродвигателя, но и оптимальные показатели регулирования частоты:
- мягкое (плавное) регулирование скоростей в большом диапазоне частоты;
- повышенная жесткость механических показателей;
- регулирование частоты вращений вала без повышения скольжения электродвигателя (за счет чего потери мощности сводятся к предельному минимуму).
Одним из условий частотного регулирования скорости асинхронного двигателя является одновременное с частотой вращений изменение напряжения, которое к нему подводится. Это нужно для повышения энергетических показателей работы электропривода (КПД, коэффициенты мощности, способности выдерживать перегрузки).
Закон частотного регулирования асинхронного двигателя (закон напряжения) определяется типом момента нагрузки (обозначается как Мс).
- Когда Мс = const, напряжение на статоре регулируется пропорционально частоте вращения, согласно выражению:
- Если характер момента нагрузки – вентиляторный, то применяется выражение:
- Если момент нагрузки обратно пропорционален частоте:
Другими словами, для реализации поставленных перед ним задач (плавное бесступенчатое частотное регулирование частоты оборотов вала асинхронного электродвигателя) частотный преобразователь должен одновременно:
- менять частоту оборотов;
- регулировать на статоре напряжение.
Технические характеристики для учета
- Диапазон изменения – Д. Представляет собой предел, до которого возможно регулирование. Вычисляется как соотношение минимальной и максимальной частоты вращения.
- Степень плавности частотного регулирования. Рассчитывается по минимальному скачку частоты вращения вала электродвигателя при переходе от одной механической характеристики к другой.
- Зона регулирования (направление изменения вращения). Номинальные условия эксплуатации задают естественный набор характеристик электродвигателя, которые при управлении частотой вращения начнут изменяться. На выходе асинхронный электродвигатель получит новые – искусственные – характеристики, которые, как правило, ниже, чем естественные.
Правила регулирования частоты
При этом важно учитывать следующее правило. При повышении количества оборотов вала относительно паспортных данных электродвигателя частота его источника питания не должна увеличиваться более, чем в 1,5–2 раза от номинальной.
Такой метод управления – частотное регулирование асинхронного двигателя – более всего оправдывает себя в механизмах и короткозамкнутым ротором. В случае с ним ввиду отсутствия скольжения потери мощности остаются минимальными, а выходные механические характеристики – с высокой жесткостью.
Плюсы электродвигателя с регулированием скорости
Основной плюс электродвигателя, управляемого с помощью частотного преобразователя, – высокий опрокидывающий момент. Это он обеспечивает стабильную эксплуатацию электропривода и подключенного к нему оборудования в большом диапазоне частот вращения.
Благодаря данному факту применение асинхронных электродвигателей с регулированием скорости позволяет отказаться от ряда механизмов (снижается потеря мощности, к которой приводит их использование), получая высокий КПД.