Обмотки статора асинхронного двигателя
Если взглянуть на обмотку статора асинхронного электродвигателя, то легко обнаружить, что она представляет собой отнюдь не просто три уложенные под 120 градусов относительно друг друга одиночные катушки. На каждую из фаз трехфазной обмотки приходится обычно по несколько секций. Эти секции отдаленно напоминают секции обмотки ротора коллекторного мотора, однако в асинхронном двигателе они выполняют совершенно иные функции.
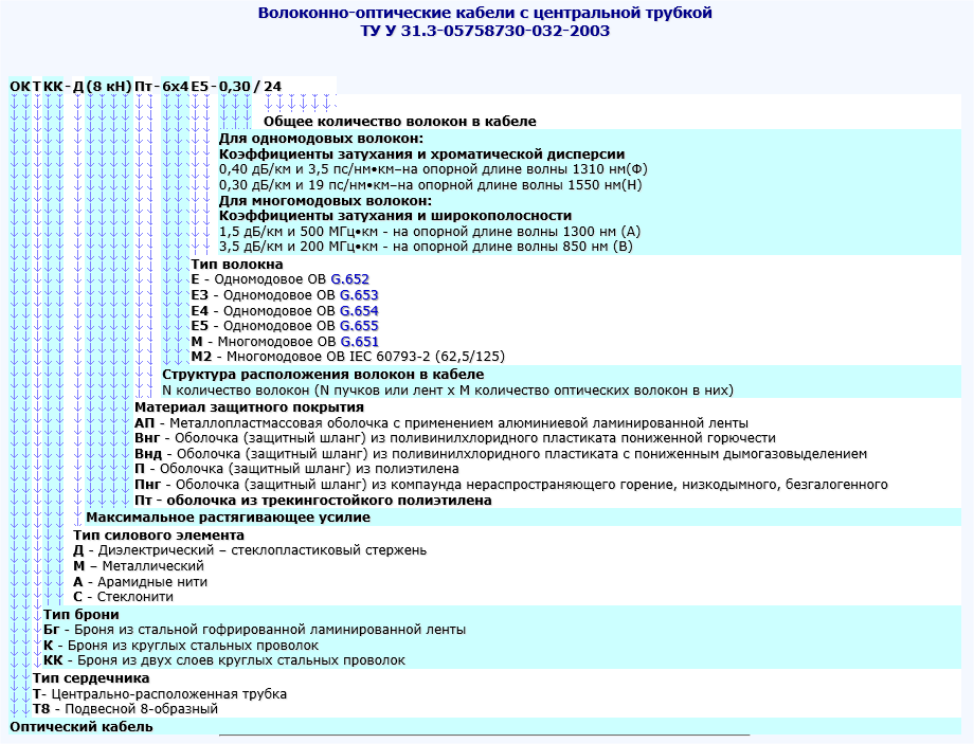
Посмотрите на первый рисунок. Здесь изображена одна секция, состоящая из четырех витков. Такая секция занимает на статоре минимум два паза. Но секцию в принципе можно разбить еще напополам — вот уже четыре паза. Тогда две части секции необходимо будет соединить последовательно, чтобы ЭДС в них суммировались.
Поскольку весь набор изолированных друг от друга проводов в секции (или условно — в части секции) укладывается в один паз, то и обозначить на схеме пучок проводов можно в виде одного витка, даже если витков в одном пазе лежит несколько. Активные проводники каждой секции могут укладываться в пазы одним слоем или двумя слоями, как на роторе коллекторного мотора.

Допустим, трехфазный асинхронный двигатель имеет одну пару полюсов (2p=2). Тогда для каждой фазы обмотки на каждый полюс будет приходиться некоторое количество пазов статора: как правило от 1 до 5 (q). В процессе проектирования машины выбирают наиболее подходящее значение этого числа q. В результате общее число пазов будет равно — число полюсов*число фаз*пазов на полюс фазы (Z = 2pmq).
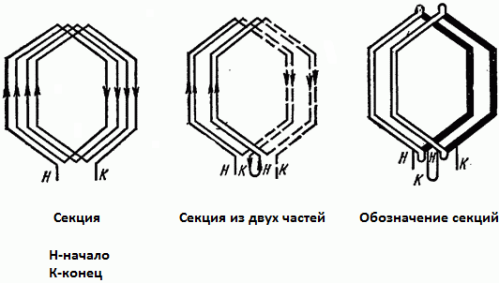
К примеру имеется: одна пара полюсов, три фазы, два паза на полюс фазы. Итак, общее число пазов: Z = 2*3*2 = 12 пазов. На рисунке ниже приведена именно такая обмотка, где на каждую фазу приходится по 4 секции, причем каждая секция состоит из двух частей (по две катушки в части) — каждая часть находится в сфере действия своего полюса (в двух полюсных делениях тау, одно полюсное деление — 180 градусов, все пазы — 360 градусов).
Пазы разделяются по фазам так: пусть у двигателя два паза на полюс на фазу, тогда на первом полюсном делении для фазы А предполагаются пазы 1 и 2, а на втором полюсном делении — 7 и 8, поскольку Z/2 = 6, и тау = 6 зубцов.
Вторая фаза (В) сдвинута относительно первой в пространстве на 120 градусов или на 2/3 тау, то есть на 4 зубца, и значит занимает пазы 5 и 6 на первом полюсном делении и пазы 11 и 12 — на втором полюсном делении.
И наконец третья фаза (С) располагается в оставшихся пазах 8 и 9 второго полюсного деления и в пазах 3 и 4 первого полюсного деления. Разметка обмотки всегда ведется по наружному слою активных проводников.
Как вы уже поняли, с целью сложения ЭДС каждой фазы, секции внутри катушек соединяют последовательно, а сами катушки (в противоположных полюсных делениях) — встречно: конец первой — с концом второй.
К трехфазной сети обмотки статора традиционно присоединяются по одной из двух схем: звезда или треугольник. Треугольник — для 220 вольт, звезда — для 380 вольт.
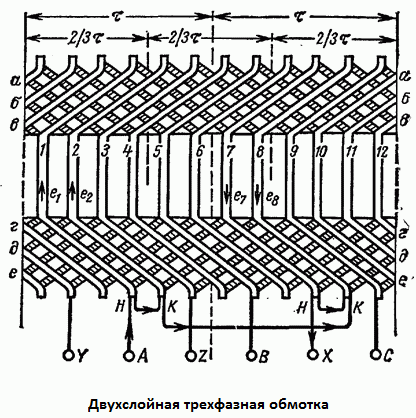
На рисунке показан статор без обмотки. Статор устанавливается в алюминиевый, чугунный или стальной корпус двигателя путем запрессовывания сердечника вовнутрь. Сердечник здесь набирается из отдельных листов стали, каждый из которых изолирован особым электротехническим лаком.
Снаружи корпус имеет ребра, благодаря которым увеличивается площадь теплообмена с окружающим воздухом и повышается эффективность активного охлаждения — пластмассовый вентилятор, насаженный на ротор сзади (под задней крышкой с перфорацией), обдувает ребра и охлаждает таким образом двигатель в процессе его работы, так предохраняет обмотки от перегрева.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Асинхронный электродвигатель: устройство, принцип работы, виды
Одним из наиболее распространенных типов электрических машин в мире является асинхронный электродвигатель. За счет высокой надежности и неприхотливости в работе такие агрегаты получили широкое распространение в самых различных отраслях промышленности и сельского хозяйства, они помогают решать бытовые и общепроизводственные задачи любой сложности. Поэтому в данной статье мы детально рассмотрим особенности асинхронных двигателей.
Устройство
Конструктивно простейшая асинхронная машина представляет собой рамку, вращающуюся в переменном магнитном поле. Однако на практике данная модель носит скорее ознакомительный характер и практического применения в промышленности не имеет. Поэтому на рисунке 1 ниже мы рассмотрим устройство действующей модели асинхронного электродвигателя.
Рис. 1. Устройство асинхронного электродвигателя
Весь двигатель располагается в корпусе станины 7, ее основная задача состоит в обеспечении достаточной механической прочности, способной выдерживать достаточные усилия. Поэтому чем выше мощность агрегата, тем большей прочностью должна обладать станина и корпус.
Внутрь корпуса устанавливается сердечник статора 3, выступающий в роли магнитного проводника для силовых линий рабочего поля. С целью уменьшения потерь в стали магнитопровод выполняется наборным из шихтованных листов, однако в ряде моделей применяется и монолитный вариант.
В пазы сердечника статора укладывается обмотка 2, предназначенная для пропуска электрического тока и формирования ЭДС. Число обмоток будет зависеть от количества пар полюсов на каждую фазу. Также в части уложенных обмоток электродвигатели подразделяются на:
- трехфазные;
- двухфазные;
- однофазные.
Внутри статора располагается подвижный элемент – ротор 6. По конструкции ротор может быть короткозамкнутым или фазным, на рисунке приведен первый вариант. В состав ротора входит сердечник 5, также набранный из шихтованной стали и беличья клетка 4. Вся конструкция насажена на металлический вал 1, передающий вращение и механическое усилие.
Принцип работы
Заключается в формировании электромагнитного поля вокруг проводника, по которому протекает электрический ток. Для асинхронного электродвигателя данный процесс начинается сразу после подачи напряжения на обмотки статора, после чего в роторе наводится ЭДС взаимоиндукции, индуцирующей вихревые токи в металлическом каркасе. Наличие вихревых токов обуславливает генерацию собственной ЭДС, которая формирует электромагнитное поле ротора. Наиболее эффективный КПД асинхронной электрической машины получается при работе от трехфазной сети.
Конструктивно обмотки статора имеют смещение в пространстве друг относительно друга на 120°, что показано на рисунке 2 ниже:
Рис. 2. Геометрическое смещение фаз в статоре
Такой прием позволяет отстроить магнитное поле рабочих обмоток в строгом соответствии с напряжением трехфазной сети, которое имеет аналогичную разность кривых электрической величины.
Рис. 3. Принцип формирования магнитного потока асинхронного двигателя
На рисунке 3 выше все три фазы изображены в разных цветах для упрощения понимания процесса, также здесь изображена кривая токов, протекающих в фазах асинхронного электродвигателя. Теперь рассмотрим физические процессы в обмотках двигателя для трех позиций показанных на рисунке:
- I – в этой позиции максимальный ток протекает в красной обмотке электродвигателя, а значение силы тока в желтой и синей равны. Основной поток силовых линий формируется красной фазой, а два других дополняют его.
- II – в данной точке желтая синусоида равна нулю, поэтому никакого потока не создает, а сила тока красной и синей равны. Поток формируется сразу двумя фазами и смещается по часовой стрелке вправо, совершая поворот.
- III – третья точка характеризуется максимумом токовой нагрузки для синей кривой, а красная и желтая имеет равную амплитуду, но противоположную по направлению. В результате чего максимум магнитных линий южного и северного полюса сместиться еще на 30°.
По данному принципу магнитное поле статора вращается в асинхронной электрической машине в течении периода. За счет магнитного взаимодействия с полем статора асинхронного электродвигателя происходит поступательное движение ротора вокруг своей оси. Можно сказать, что ротор пытается догнать поле статора. Именно за счет разницы во вращении полей данный тип электрической машины получил название асинхронной.
Отличие от синхронного двигателя
Наряду с простыми асинхронными электрическими машинами в промышленности также используются и синхронные агрегаты. Основным отличием синхронного двигателя является наличие вспомогательной обмотки на роторе, предназначенной для создания постоянного магнитного потока, что показано на рисунке 4 ниже.
Рис. 4. Отличие асинхронного от синхронного электродвигателя
Эта обмотка создает магнитный поток, не зависящий от наличия электродвижущей силы в обмотках статора электродвигателя. Поэтому при возбуждении синхронного электродвигателя его вал начинает вращаться одновременно с полем статора. В отличии от асинхронного типа, где существует разница в движении, которая физически выражается как скольжение и рассчитывается по формуле:
где s – это величина скольжения, измеряемая в процентах, n1 – частота, с которой вращается поле статора, n2 – частота, с которой вращается ротор.
Синхронные электродвигатели применяются в тех устройствах, где важно соблюдать высокую точность синхронизации подачи питания и начала движения. Также они обеспечивают сохранение рабочих характеристик в момент пуска.
На практике существует огромное количество разновидностей асинхронных электродвигателей, отличающихся как сферой применения, так и мощностью согласно ГОСТ 12139-84 . В связи с тем, что все вариации перечислить невозможно, мы рассмотрим наиболее значимые критерии, по которым асинхронные аппараты разделяются на виды.
По количеству питающих фаз выделяют:
- трехфазные – используются в сетях, где есть возможность подключиться сразу ко всем фазам, но в частных случаях могут запускаться и в однофазной сети;
- двухфазные – применяются во многих бытовых приборах, состоят из двух рабочих обмоток, одна из которых питается напряжением сети, а вторая подключается через фазосдвигающий конденсатор.
- однофазные – как и предыдущая модель содержат две обмотки, одна из которых рабочая, а вторая пусковая.
По типу ротора различают:
- с короткозамкнутым ротором – имеет тяжелый пуск, но и меньшую стоимость;
- с фазным ротором – на роторе устанавливается вспомогательная обмотка, делающая работу электродвигателя более плавной.
По способу подачи питания:
- статорные – классические модели, в которых рабочие обмотки устанавливают на статор;
- роторные – рабочие обмотки помещаются на вращающемся элементе, широкое применение на практике получили асинхронные двигатели Шраге-Рихтера.
Способы пуска и схемы подключения
Асинхронный электродвигатель с короткозамкнутым ротором обладает низкой себестоимостью, большими пусковыми токами и низким усилием на старте. Поэтому для различных целей могут применять различные способы пуска, снижающие бросок тока в обмотках и улучшающие рабочие характеристики:
- прямой – напряжение на электродвигатель подается через пускатели или контакторы;
- переключение схемы соединения обмоток электродвигателя со звезды на треугольник;
- понижение напряжения;
- плавный пуск;
- изменение частоты питающего напряжения.
Однофазного асинхронного двигателя.
Для асинхронного однофазного электродвигателя могут использоваться три основных способа пуска:
- С расщеплением полюсов – используется в электродвигателях особой конструкции, но недостатком методы является постоянная потеря мощности.
- С конденсаторным пуском – вводит пусковой конденсатор в момент запуска асинхронного двигателя и убирает его со схемы через несколько секунд после начала работы. Обладает максимальным вращательным моментом.
- С резисторным пуском электродвигателя – обеспечивает начальный сдвиг между векторами ЭДС обмоток для скольжения в асинхронной машине.
Трехфазного асинхронного двигателя.
Трехфазные асинхронные агрегаты могут подключаться такими способами:
- Напрямую в цепь через пускатель или контактор, что обеспечивает простоту процесса, но формирует максимальные токи. Этот способ не подходит в случае больших механических нагрузок на вал.
- Переключением схемы со звезды на треугольник – применяется для снижения токов в обмотках электродвигателя за счет уменьшения питающего напряжения с линейного на фазное.
- Путем подключения через преобразователь напряжения, реостаты или автотрансформатор для снижения разности потенциалов. Также используется изменение числа пар полюсов, частоты питающего напряжения и прочие.
Помимо этого трехфазные асинхронные двигатели могут использовать прямую и реверсивную схему включения в цепь. Первый вариант применяется только для вращения вала электродвигателя в одном направлении. В реверсивной схеме можно переключать движение рабочего органа в прямом и обратном направлении.
Рис. 9: прямая схема без возможности реверсирования
Рассмотрим нереверсивную схему пуска асинхронного электродвигателя (рисунок 9). Здесь, через трехполюсный автомат QF1 питание подается на пускатель KM1. При нажатии кнопки SB2 произойдет подача напряжения на обмотки электродвигателя, его остановка осуществляется кнопкой SB1. Тепловое реле KK1 применяется для контроля температуры нагрева, а лампочка HL1 сигнализирует о включенном состоянии контактора.
Рисунок 10: схема прямого включения с реверсом
Реверсивная схема (смотрите рисунок 10) устроена аналогичным образом, но в ней используются два пускателя KM1 и KM2. Прямое включение асинхронного электродвигателя производиться кнопкой SB2, а обратное SB3.
Применение
Область применения асинхронных электродвигателей охватывает достаточно большой сегмент хозяйственной деятельности человека. Поэтому их можно встретить в различных типах станочного оборудования – токарных, шлифовальных, фрезерных, прокатных и т.д. В работе грузоподъемных кранов, талей, тельферов и прочих механизмов.
Их используют для лифтов, горнодобывающей техники, землеройного оборудования, эскалаторов, конвейеров. В быту их можно встретить в вентиляторах, микроволновках, хлебопечках и прочих вспомогательных устройствах. Такая популярность асинхронных электродвигателей обусловлена их весомыми преимуществами.
Преимущества и недостатки
К преимуществам асинхронных электродвигателей, в сравнении с другими типами электрических машин следует отнести:
- Относительно меньшая стоимость, в сравнении с другими типами электродвигателей, за счет простоты конструкции;
- Высокая степень надежности, благодаря отсутствию вспомогательных элементов редко выходят со строя;
- Способны выносить кратковременные перегрузки;
- Могут включаться в цепь напрямую без использования дополнительного оборудования;
- Низкие затраты на содержание в ходе эксплуатации.
Основными недостатками асинхронного электродвигателя являются относительно большие пусковые токи и слабый пусковой момент, что в определенной степени ограничивает сферу прямого включения. Также асинхронные электродвигатели обладают низким коэффициентом мощности и сильно зависят от параметров питающего напряжения.
Как работает электродвигатель [для чайников]
Сегодня электродвигатели всё чаще приходят на замену безнадежно устаревшим бензиновым агрегатам и используются как в современном транспорте, так и в многочисленных электронных устройствах. Примеры использования этих силовых агрегатов можно встретить повсюду. Вибровызов в телефоне осуществляется благодаря работе электродвигателя, современный электровелосипед тоже едет благодаря электродвигателю и даже «любимое» метро — всё это электродвигатели.
Разновидностей электродвигателей сегодня существует огромное количество, но есть один важный фактор, который будет практически для всех них схожим. Речь идёт о физике работы этого типа устройств. Отметим, что далеко не все они будут использовать в своей работе описываемый далее принцип, но большая часть электродвигателей работают именно так. Как минимум, физический эффект, на котором всё это держится, сохраняется. Прежде, чем обсуждать подробно физику процесса, благодаря которому происходит вращение электродвигателя, рассмотрим сначала конструкцию простейшего двигателя.
Конструкция простейшего электродвигателя
Простейший электродвигатель
Опять-таки, отметим, что рассматриваемая конструкция — это далеко не единственный вариант реализации подобных устройств. Однако, большая часть приборов работает именно так и среди бытовых приборов или в транспорте вы вряд ли обнаружите что-то другое. Поэтому, рассмотрим простейшую схему и элементарный вариант реализации прибора.
Конструкция самого простого электродвигателя является довольно примитивной. Он состоит из статора и ротора. Всё это убрано в корпус и подсоединяется проводами к источнику электрической энергии. Ещё есть подшипники, но это вещь сугубо механическая и нас сейчас не особенно интересует.
Части двигателя
Статор — это неподвижная часть. Преимущественно неподвижная часть представлена постоянными магнитами. Но бывает и обратный вариант, когда на статоре выполнена обмотка. Различие обусловлено тем, в сети какого типа работает двигатель — постоянного или переменного тока.
Ротор — это подвижная часть, которая, как правило является якорем, а на нем выполнена обмотка. К ротору подходят щётки, на которые подается электрический ток.
Щетки подключаются проводами к источнику питания. Именно они «передают электричество». Но щетки есть не во всех конструкциях двигателей.
Вся конструкция смонтирована в корпус и в закрытом виде представляет собой готовый к работе силовой агрегат. Иногда на ротор двигателя ещё добавляется крыльчатка вентилятора, которая обеспечивает циркуляцию воздуха через агрегат и его дополнительное охлаждение. Так обычно монтируются двигатели постоянного тока.
На валу двигателя мы получаем крутящий момент, который прекрасно можно использовать для своих нужд. Например, передать его посредством зубчатой передачи на редуктор или использовать непосредственно для получения полезной работы (как в вентиляторе дома).
Женщина доила корову, а воде отражалось всё наоборот. Такое может быть и с конструкцией электродвигателя. Тогда намотка там будет на статоре, вместо ротора. Это уже будут двигатели переменного тока. Сам же ротор будет выполнен или из постоянных магнитов, или выглядеть как короткозамкнутая клетка (её ещё именуют беличье колесо).

Бывает также, что и статор, и ротор электродвигателя представляют собой обмотки. Тогда картина незначительно меняется. Правда смысл всё равно сохраняется прежним. Про принципы конструирования таких машин мы поговорим чуть позже.
Принцип работы любого электродвигателя
Физический принцип работы электродвигателя держится на свойствах рамки с током в магнитном поле. Самое простое объяснение эффекта будет поверхностным, но ясным. Вспомните, как ведут себя два магнита, которые мы сводим одноименными полюсами. Они отталкиваются! При некотором приближении, можно сказать, что это и есть физический принцип работы любого электродвигателя.
Тем или иным способом нам нужно создать два магнитных поля, которые оттолкнут друг друга. Если одно поле создать на крутящемся якоре, а второе на корпусе или статоре, то одно поле будет толкать другое, а движение будет превращаться в крутящий момент и получится двигатель. Дальше остается только поиграться с конструкцией. И таких конструкций известно много, но мы обсудим самые распространенные. Это двигатель постоянного тока и двигатель переменного тока. Последний вариант разделяют на синхронные и асинхронные.
Физический принцип работы электродвигателя постоянного тока
Если мы вспомним закон Ампера, то будет понятно, что на проводник с током в магнитном поле действует некоторая сила. Именно это обстоятельство позволяет получить вращающийся якорь.
Вспомним самый простой опыт, который показывают школьникам. Рамку с током помещают в магнитное поле и она начинает двигаться. Правда двигается она недолго, а скорее дергается. Всему виной несовпадение векторов. Размести мы магниты слегка иначе и получили бы постоянное движение.
Силы Ампера, действующие на боковые стороны рамки, будут создавать вращающий момент, величина которого пропорциональна магнитной индукции, силе тока в рамке, ее площади S и зависит от угла a между вектором магнитной индукции и нормалью к рамке.
Рамка с током в магнитном поле
В представленной ситуации рамка будет вращаться только тогда, когда вектора Fа будут не деформировать её, а придавать вращательное движение.
Вот так крутится рамка
Для этого в данном примере рамку нужно повернуть на 90 градусов. Теперь представим, что якорь нашего двигателя весь состоит из таких рамок, их очень много. Это улучшит процесс движения.

Вот и получился самый простой электрический двигатель постоянного тока.
Теперь представим, как будет выглядеть поведение такого двигателя при включении в цепь с переменным током. Он начнет танцевать в разные стороны. Ведь переменный электрический ток отличается тем, что регулярно меняет своё направление. Рамка с током, через которую он проходит, будет также менять направление своего движения. Крутиться равномерно такая штука не сможет. Поэтому, в переменных сетях используется двигатели переменного тока. Двигатель постоянного тока конечно же сможет работать в переменной сети, но для этого нужно использовать выпрямитель перед ним.
Правда бывают и универсальные электродвигатели, которые одинаково комфортно юзаются и там, и там. Но про это чуть позже.
Физический принцип работы электродвигателя переменного тока
Тут логика работы строится немного иначе. Обмотка у нас находится на статоре. А вот ротор представляет собой сердечник со специальной замкнутой рамкой или постоянными магнитами. Так проще обыграть постоянную смену направления тока.
Если двигатель переменного тока однофазный (или, правильнее сказать, может работать в нашей электрической цепи на 220 В) , то в обмотке статора при прохождении тока создается пульсирующее магнитное поле. Это поле раскладывается на два поля, имеющих равные амплитуды и вращающиеся в противоположные стороны с одинаковой частотой. Для разложения мы просто делаем замкнутый контур и получаем, что по одной части контура ток идёт в одну сторону, а по другой — в противоположную. Вот вам и момент, который крутанет рамку с током. А точнее — ротор определенной конструкции. Дальше обмотку статора «разносят» на 180 градусов и получают рабочую схему.

Поскольку полярность тока на статоре постоянно меняется, получается что генерируемое магнитное поле тоже меняет направление и регулярно, в соответствии с фазой колебания, «даёт пинок» нашему якорю. Этот процесс и порождает непрерывное равномерное движение ротора. Но есть тут один прикол!
Если двигатель однофазный, то прежде, чем он начнет работать, его ротор нужно крутануть. Или же магнитное поле так и будет пульсировать, а ротор так и будет стоять. Для этого обычно используется дополнительная обмотка или прочие ухищрения. Для создания вращающегося магнитного поля необходимо, чтобы магнитный поток через пусковую обмотку был сдвинут по фазе относительно рабочей. Но про это как-нибудь в другой раз.
Отметим, что этого недуга лишены трехфазные двигатели переменного тока. Там всё тоже самое, но поскольку у нас есть три разных фазы с разными точками максимальных значений относительно времени, в статоре создается вращающееся магнитное поле.
Оно начинает бегать по кругу, а заодно пинает ротор. Этот процесс и порождает непрерывное равномерное движение ротора. Тут уже не нужно никакое возбуждение, потому что ротор будет регулярно пинаться по кругу, как карусель, раскручиваемый детьми.

Синхронный и асинхронный двигатели переменного тока
Двигатели переменного тока подразделяют на синхронные и асинхронные. Для постоянного тока это разделение не имеет особого смысла. Ведь там нет как такового понятия фаза и изменения направления тока.
Логика работы в обоих двигателях одинаковая. Но, судя по названию, в асинхронном что-то должно происходить ни в такт с основным процессом.
Синхронный и асинхронный двигатели отличаются преимущественно конструкцией ротора.
В роторе синхронного двигателя предусмотрена обмотка с независимой подачей напряжения или постоянные магнитики. Они толкают ротор относительно пульсирующего магнитного поля.
Ротор синхронного двигателя
У асинхронного ротора ток формируется с помощью магнитного статорного поля. В соответствии с законом электромагнитной индукции под действием прямого и обратного магнитных потоков в обмотке ротора станет действовать электродвижущая сила. Ротор похож по своей конструкции на колесо для грызуна. Но бывают и варианты с обмоткой, расположенной определенным образом.
 Ротор асинхронного двигателя
Ротор асинхронного двигателя
В синхронном двигателе поля статора и ротора взаимодействуют друг с другом и имеют равную скорость. Ротор вращается в соответствии и точно в такт с полем статора. Частота вращения ротора синхронна частоте тока обмотки статора.

У асинхронных агрегатов имеет место разность магнитного поля роторного и статорного механизма на величину скольжения. Это то самое проскальзывание. Обороты асинхронного двигателя под нагрузкой всегда на величину скольжения отстают от вращения магнитного поля статора.

Не забываем, что обмотка ротора асинхронного двигателя, будь-то клетка или катушки под 120 градусов, является замкнутым контуром. В ней наводится ЭДС, а возникающий магнитный поток придает вращение ротору, отталкиваясь от пульсирующего магнитного поля статора. Движется эта кухня в направлении движения магнитного потока статора. Вращающий электромагнитный момент пытается уравнять скорости вращения магнитных полей статора и ротора, но это не всегда получается (а лучше сказать — никогда). Ведь уровнять эти моменты можно лишь в случае, если создавать поля одновременно, как в синхронном двигателе. Также влияет механическая нагрузка, которая подключена к валу ротора и мешает догнать поле. Но и в свободном состоянии эти цифры будут различаться. Ведь у любого механизма имеется некоторая инертность, а на время появления поля в замкнутой клетке (т.е. роторе асинхронного двигателя) тоже требуется время.
Вообщем-то, это основные вещи, которые вам следует уяснить. Всё остальное — это погружение в особенности конструкций конкретных агрегатов.