Регулятор оборотов электродвигателя: назначение, принцип работы
В большинстве современных бытовых и промышленных приборов применяются электрические машины, совершающие какую-либо полезную работу. В качестве рабочего инструмента в них могут выступать самые разнообразные приспособления, которые необходимо вращать с различной скоростью. Для изменения этого параметра используется регулятор оборотов электродвигателя.
Назначение
Технически регулятор оборотов электродвигателя предназначен для изменения количества вращения вала за единицу времени. На этапе разгона корректировка частоты обеспечивает более плавную процедуру, меньшие токи и т.д. В некоторых технологических процессах необходимо регулятор оборотов снижает скорость движения оборудования, изменение подачи или нагнетания сырья и т.д.
Однако на практике данная опция может преследовать и другие цели:
- Экономия затрат электроэнергии – позволяет снизить потери в моменты пуска и остановки вращений мотора, переключения скоростей или регулировки тяговых характеристик. Особенно актуально для часто запускаемых электродвигателей, использующих кратковременные режимы работы.
- Контроль температурного режима, величины давления без установки обратной связи с рабочим элементом или с таковой в асинхронных электродвигателях.
- Плавный пуск – предотвращает бросок тока в момент включения, особенно актуально для асинхронных моторов с большой нагрузкой на валу. Приводит к существенному сокращению токовых нагрузок на сеть и исключает ложные срабатывания защитной аппаратуры.
- Поддержание оборотов трехфазных электродвигателей на требуемой отметке. Актуально для точных технологических операций, где из-за колебаний питающего напряжения может нарушиться качество производства или на валу возникает разное усилие.
- Регулировка скорости оборотов электродвигателя от 0 до максимума или от другой базовой скорости.
- Обеспечения достаточного момента на низких частотах вращения электрической машины.
Возможность реализации тех или иных функций у регуляторов оборотов определяет как принцип их действия, так и схематическое исполнение.
Принцип работы
Для регулировки оборотов может использоваться способ понижения или повышения напряжения, изменение силы тока и частоты, подаваемых в обмотки асинхронных и коллекторных электродвигателей. Поэтому далее рассмотрим варианты частотных преобразователей и регуляторов напряжения.
Среди используемых в промышленной и бытовой сфере следует выделить:
- Введение рабочего сопротивления – реализуется при помощи переменных резисторов, делителей и прочих преобразователей. Хорошо обеспечивает снижение в однофазных двигателях за счет контроля скольжения (разницы между магнитным полем статора и скоростью вращения асинхронных агрегатов). Для этого устанавливаются электродвигатели большей мощности, чтобы на них можно было подавать меньшее напряжение. Соотношение по скорости оборотов будет составлять до 2 раз в сторону уменьшения.
- Автотрансформаторный – выполняется путем перемещения подвижного контакта по обмотке, что снижает или увеличивает скорость вращения электродвигателя. Преимущество такого принципа заключается в четкой синусоиде переменного тока и большой перегрузочной способности.
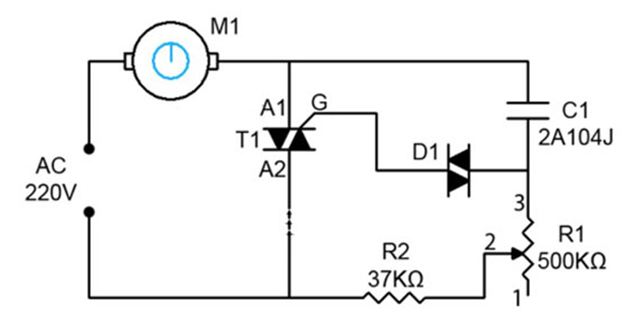
- Тиристорный или симисторный – изменяет величину питающего напряжения посредством пары встречно включенных тиристоров или совместного включения с симистором. Этот способ применим не только в асинхронных двигателях, но и других бытовых приборах – диммерах, переключателях и т.д.
Как видите на схеме, подаваемое на тот же асинхронный однофазный электродвигатель напряжение, проходит через переменный резистор R1 на тиристор D1 и на управляющий электрод симистора T1. Перемещая ручку тиристорного регулятора R1 изменяем и скорость вращения однофазного электродвигателя.
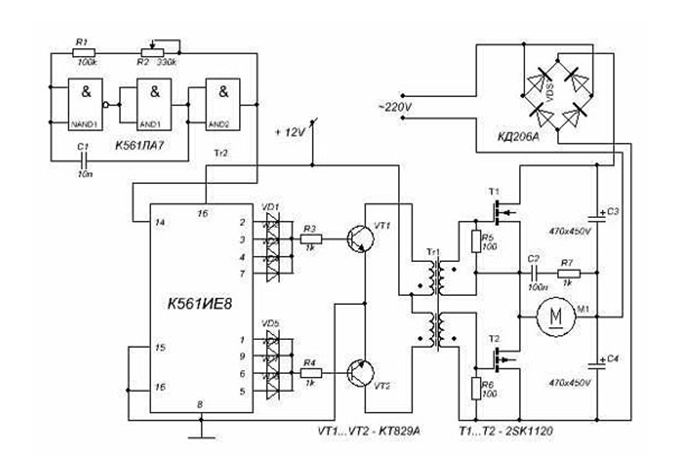
- Транзисторный – позволяет изменять форму подаваемого напряжения за счет преобразования числа импульсов и временной паузы между подаваемым напряжением. Благодаря чему получил название широтно-импульсной модуляции, пример такого регулятора приведена на схеме ниже.
Здесь питание однофазного асинхронного двигателя производится от линии 220В через выпрямительный блок VD1-4, далее напряжение поступает на эмиттер и коллектор транзисторов VT1 и VT2. Подавая управляющий сигнал на базы этих транзисторов, и регулируют обороты мотора.
- Частотный – преобразует частоту подаваемого напряжения на обмотки однофазного или трехфазного асинхронного электродвигателя. Это наиболее современный способ, ранее он относился к дорогостоящим, но с появлением дешевых высоковольтных полупроводников и микроконтроллеров перешел в разряд наиболее эффективных. Может реализовываться с помощью транзисторов, микросхем или микроконтроллеров, способных уменьшать или увеличивать частоту ШИМ.
- Полюсный – позволяет регулировать частоту вращения электродвигателя при переключении количества катушек в фазных обмотках, в результате чего изменяется направление и величина тока, протекающего в каждой из них. Реализуется как за счет намотки нескольких катушек для каждой из фаз, так и одновременным последовательным или параллельным соединением катушек, такой принцип приведен на рисунке ниже.
Как выбрать?
Конкретная модель регулятора оборотов должна подбираться в соответствии с типом подключаемой электрической машины – коллекторный двигатель, трехфазный или однофазный электродвигатель. В соответствии с чем и подбирается определенный преобразователь частоты вращения.
Помимо этого для регулятора оборотов необходимо выбрать:
- Тип управления – выделяют два способа: скалярный и векторный. Первый из них привязывается к нагрузке на валу и является более простым, но менее надежным. Второй отстраивается по обратной связи от величины магнитного потока и выступает полной противоположностью первого.
- Мощность – должна выбираться не менее или даже больше, чем номинал подключаемого электродвигателя на максимальных оборотах, желательно обеспечивать запас, особенно для электронных регуляторов.
- Номинальное напряжение – выбирается в соответствии с величиной разности потенциалов для обмоток асинхронного или коллекторного электродвигателя. Если вы подключаете к заводскому или самодельному регулятору одну электрическую машину, будет достаточно именно такого номинала, если их несколько, частотный регулятор должен иметь широкий диапазон по напряжению.
- Диапазон частот вращения – подбирается в соответствии с конкретным типом оборудования. К примеру, для вращения вентилятора достаточно от 500 до 1000 об/мин, а вот станку может потребоваться до 3000 об/мин.
- Габаритные размеры и вес – выбирайте таким образом, чтобы они соответствовали конструкции оборудования, не мешали работе электродвигателя. Если под регулятор оборотов будет использоваться соответствующая ниша или разъем, то размеры подбираются в соответствии с величиной свободного пространства.
Подключение
Способ подключения регулятора оборотов электродвигателя будет отличаться в зависимости от его типа и принципа действия. Поэтому в качестве примера мы разберем один из наиболее распространенных частотных регуляторов, которые используются в самых различных сферах.
Перед подключением обязательно ознакомьтесь с заводской схемой. Как правило, вы можете увидеть ее на самом регуляторе оборотов, либо в паспорте устройства:
Схема подключения регулятора
Далее, пользуясь распиновкой, можно определить количество выводов, которые будут использоваться для подключения регулятора электродвигателя к сети. В нашем примере, рассмотрим случай, когда применяется трехпроводная система, значит, понадобится фаза, ноль и земля. На задней панели регулятора это два вывода AC и FG:
Распиновка регулятора
Затем необходимо проверить цветовую маркировку разъема с приведенной схемой и сопоставить ее со всеми элементами электродвигателя, которые будут подключаться в вашем случае. Если какие-то выводы окажутся лишними, их можно закоротить, как показано на рисунке выше.
Проверьте цветовую маркировку
Если все выводы регулятора соответствуют клеммам электродвигателя, можете подсоединять их друг к другу и к сети.
Чипгуру
О частотном регулировании асинхронного привода.
- Перейти на страницу:
О частотном регулировании асинхронного привода.
Сообщение #1 T-Duke » 10 фев 2016, 16:37
Так как вижу что в соседней теме возникают некоторые споры и даже заблуждения, решил создать отдельную тему, где моя темность осветит некоторые вопросы связанные с асинхронным приводом. Буду стараться говорить простыми словами на пальцах. Всяких дотошных буквоедов, которые цепляются к тому о чем не упомянул для экономии места и времени — прошу идти мимо. Я не собираюсь здесь писать монографию из многих глав, описывая каждый нюанс. Только главное, важное для понимания. Так же для тех кому нечего делать, или хочется холиварить , прошу, не нужно превращать этот форум в подобие чипа. Троллям там самое место, а здесь хочется конструктивно общаться и если кому, что непонятно — задавйте вопросы.
О роторе.
Итак самое главное что нужно сказать и с чего нужно начать. Асинхронные двигатели работают при наличии такого явления как скольжение поля. Когда вращающееся магнитное поле статора по скорости вращения, опережает ротор.
Только при наличии скольжения в беличьем колесе ротора наодится ЭДС и возникает крутящий момент. Детально углубляться не будем. Главное что нужно понимать — если скольжение равно нулю, то есть ротор верится с той же скоростью, что и поле статора, то крутящий момент тоже нулевой.
Второе, что важно понимать — для конкретного двигателя есть предельная величина скольжения. При таком скольжении крутящий момент ротора максимален. Если еще больше увеличить скольжение, то момент начинает падать. Графики момента в зависимости от скольжения (скорости ротора) можно найти в учебниках. Классический пример запуск 50Гц асинхронника от сети 50Гц при большой нагрузке на валу. В начальный момент скольжение очень велико. Ибо ротор почти неподвижен, а поле вертится с полной частотой. Скольжение значительно выше предельного и крутящий момент сильно ниже, чем в случае предельного скольжения. Это объясняется резким ростом потерь в роторе при превышении критического скольжения.
Итак, чтобы получать максимально возможный момент асинхронника во всем диапазоне скоростей, ПЧ должен строго поддерживать одну и ту же величину скольжения — то есть предельное скольжение, или его можно назвать оптимальным. С такой задачей может справиться только векторный частотник. Если двигатель управляется векторным частотником, то там даже при частоте в несколько Гц, возможен полный крутящий момент. Если частотник не векторый, а обычный, у которого нет ОС по скорости ротора, скольжение ротора будет произвольно меняться в зависимости от нагрузки на двигатель, и оптимального момента во всем диапазоне оборотов мы не получим.
О статоре.
Второй важный фактор — статор двигателя. Вернее то, что он электрически представляет собой для сети переменного тока, или для ПЧ. Электрически двигатель собой представляет индуктивность, последовательно включенную со сопротивлением обмоток. И параллельно ко всему этому подключена распределенная межвитковая емкость. Для этой темы емкость обмоток не играет роли, поэтому будем рассматривать статор двигателя как индуктивность и сопростивление включенное последовательно с индуктивностью. Важный момент здесь — номинальная частота, на которую изготовлен двигатель и номинальне напряжение питания в рекомендованном подключении. например частота 50Гц, напряжение 380В — звезда.
Чтобы понять поведение двигателя при изменении частоты протекающего через него тока, для начала проведем эксперимент. Вытащим из двигателя ротор, оставим только статор и будем подавать в двигатель переменный ток различной частоты. Зачем убираем ротор? Когда поговорим об асинхроннике как о трансформаторе станет понятно. Убрав же ротор из асинхронника, мы превращием его в банальный дроссель.
Итак убрали ротор и подали на двигатель номинальное напряжение, номинальной частоты, скажем 50Гц. Через обмотки статора начнет течь ток ХХ двигателя и вокруг полюсов статора начнет вращаться магнитное поле с частотой обратной пропорциональной числу пар полюсов. В двухполюсном двигателе частота вращения поля совпадает со сетью — 50Гц. В 4-х полюсном в 2 раза меньше 25Гц, во 8-ми полюсном 12.5Гц и т.д. Но сейчас это не важно. Важно понять что статор предназначен для создания внутри своего объема, вращающегося магнитного поля заданной частоты и силы.
Так вот статор двигателя включен в сеть 50Гц, на которую он рассчитан и по обмоткам течет некий ток ХХ. Возникает вопрос — А что если мы частоту тока сети уменьшим, или увеличим? Возьмем и подадим вместо номинальных 50Гц, частоту 25Гц. Что-то изменится. А именно уменьшится сопротивление обмоток двигателя переменному току. Ровно в 2 раза. Ток ХХ вырастет в два раза. Если подадим на обмотки ток с частотой 100Гц, то сопротивление обмоток увеличится и ток ХХ упадет в 2 раза. То есть статор асинхронника без ротора, ведет себя как классический дроссель — обыная индуктивно-резистивная нагрузка в сети переменного тока.
Об асинхронном двигателе, как о вращающемся трансформаторе.
А теперь первый раз проведу аналогию между асинхронником и трансформатором. Пока на роторе нет нагрузки и ротор вращается равномерно, для сети переменного тока (или ПЧ) двигатель представляет собой аналог первичной обмотки трансформатора включенного в сеть переменного тока. При чем вторичная обмотка которого нагружена на довольно большое сопротивление, представляющее собой различные потери.
Пока на вторичной обмотке обычного транса нет нагрузки, то первичная обмотка ведет себя как дроссель большой индуктивности. Через первичку протекает небольшой ток ХХ, его еще называют током намагничивания.
То же самое и с асинхронником. Пока нагрузки на валу нет, то через обмотку статора протекает небольшой ток ХХ, создающий вращающееся магнитное поле в статоре и компенсирующий разные потери, например на трение в подшипниках.
Снова вернемся к обычному трансу, но теперь во вторичку включим нагрузку, например лампочку. Это моментально приведет к тому, что первичная обмотка почувствует эту нагрузку и отреагирует на это тем, что уменьшит свой имеданс переменногому току. Строго говоря тут нужно говорить не об импедансе, а о принципах работы трансформатора. Но чтобы короче — будем думать, что меняется импеданс, что в принципе тоже правильно, если не вдаваться в детали. То есть как только появится нагрузка на вторичке, в первичке сразу подскочит потребление тока. Аналогичная ситуация с асинхронником. Как только мы дадим нагрузку на ротор, это моментально скажется на обмотке статора и ток через обмотку увеличится, для компенсации воздействия нагрузки.
То есть асинхронный двигатель являет собой вращающийся трансформатор сразу преобразовывающий переменный ток в механическую работу на выходе. Первичкая обмотка такого транса — обмотка статора. Вторичная обмотка — беличье колесо в роторе. Выход не электрический а механический.
Об управлении асинхронным приводом.
Теперь когда мы понмаем, что асинхронник это по сути трансформатор, хоть и своеобразный, рассмотрим работу такого транса на разных частотах.
Если мы подаем на ненагруженный транс номинальную частоту 50Гц, то через первичку течет номинальный ток ХХ. Если уменьшаем частоту до 25Гц, то через транс начинает течь ток ХХ в два раза выше. То есть на ровном месте ток становится выше в два раза. Нагрев обмотки от холостого тока растет уже в четыре раза, по закону Джоуля-Ленца. То есть мы ничего не меняли кроме частоты. Нагрузку не подключали, а ток уже вырос.
Если еще уменьшим частоту, например до 12.5Гц, то ток ХХ вырастет в 4 раза по сравнению с номинальным при 50Гц. Нагрев обмотки током ХХ вырастет уже в 16 раз. То есть видим, что тут что-то нужно делать.
Выход есть. Он называется законом управления V/f = const. Если мы изменяем частоту которой питаем трансформатор, то мы должны изменить и напряжение подаваемое на транс, чтобы не менялся ток через первичку. То есть, если мы питаем двигатель рассчитанный на 380В и 50Гц, от сети частотой 25Гц, то напряжение в этой сети должно составлять уже половину — 190В. Иначе двигатель будет работать в нерасчетном режиме, с большими потерями как в меди, так и в стали статора.
Главный вывод из этого — при уменьшении частоты тока питающего двигатель — необходимо уменьшать напряжение подаваемое на этот двигатель. Этим и занимаются частотники. Когда мы выкручиваем регулятор на 25Гц, частотник вместо положенных 220В дает уже 110В и двигатель работает в своих номинальных параметрах.
А как же на счет крутящего момента ротора? А ему наплевать на напряжение, которым питают статор двигателя. Ротору нужно скольжение и номинальная индукция поля. Если нужное скольжение обеспечено, и хватает тока через обмотки для создания номинальной индукции поля, то обеспечен и номинальный крутящий момент. То есть, если мы питаем асинхронник током частоты 25Гц и напряжением 110В, то это никак не сказывается на крутящем моменте, если скольжение не изменилось.
Этот факт и говорит о том, что векторный частотник может давать хороший момент на низах, вплоть до нескольких Гц, так как он выдерживает заданное скольжение. Ограничением крутящего момента на низах, служит сопростивление провода обмоток статора, а если точнее то потери на обмотках при попытке достичь той же индукции поля, при пониженном напряжении питания. Когда частота вращения поля низкая, то на двигатель подается напряжение сильно ниже номинального и больше сказывается влияние оммического сопротивления обмоток. Это равноценно тому, что сам закон V/f=const начинает меняться. Вместо константы в правой части уравнения появляется переменная величина, которая может быть к тому же нелинейной. Хороший векторный частотник знает как управляться с этой перменной, поэтому возможен высокий крутящий момент, даже на частоте порядка 1Гц. Хотя все это ценой повышенных потерь, то есть пониженного КПД двигателя. Тут ничего не поделать это недостатки асинхронного привода.
Вот блин, затронул только самое главное в общих чертах, даже не трогал двигатели с переключением полюсов, а сколько текста уже. Если же вдаваться в детали, то можно целую книгу написать. Так что всяких педантов, прошу понять, что всех деталей нельзя упомянуть в одном посте и выясняя их можно на сотни страниц разойтись.
Если публике будет интересно, то мое темнейшество может осветить вопрос торможения асинхронника, когда он переходит в режим генератора.
Как регулировать обороты асинхронного электродвигателя 220в: регулятор скорости трехфазного двигателя | Слава созидателям
Благодаря своей простоте исполнения, относительной дешевизне и надежности трехфазные двигатели широко используются в хозяйстве и производстве. Во многих исполнительных механизмах применяют всевозможные типы асинхронных двигателей. Для широкого спектра применения АД, необходимо изменять и регулировать скорость вращения вала двигателя. Регулировка скорости АД производят несколькими способами.
Регулирование частотой
Специальные устройства, преобразователи частоты (другие названия инвертор, частотник, драйвер), подключаются к электрической машине. Путем выпрямления напряжения питания, преобразователь частоты внутри себя формирует необходимые величины частоты и напряжения, и подает их на электрический двигатель.
Необходимые параметры для управления АД преобразователь рассчитывает самостоятельно, согласно внутренним алгоритмам, запрограммированным производителем устройства.
Преимущества регулирование частотой .
- Достигается плавное регулирование частоты вращения электромотора.
- Изменение скорости и направление вращения двигателя.
- Автоматическое поддержание требуемых параметров.
- Экономичность системы управления.
Единственный недостаток, с которым можно смирится, это необходимость в приобретении частотника. Цены на такие устройства совсем незаоблачные, и в пределах 150 уе, можно обзавестись преобразователем для 2 кВт двигателя.
Что такое асинхронный двигатель?
Электродвигатели переменного тока нашли довольно широкое применение в различных сферах нашей жизнедеятельности, в подъемно транспортном, обрабатывающем, измерительном оборудовании. Они используются для превращения электрической энергии, которая поступает от сети, в механическую энергию вращающегося вала. Чаще всего используются именно асинхронные преобразователи переменного тока. В них частота вращения ротора и статора отличаются. Между этими активными элементами обеспечивается конструктивный воздушный зазор.
И статор, и ротор имеют жесткий сердечник из электротехнической стали (наборного типа, из пластин), выступающий в роли магнитопровода, а также обмотку, которая укладывается в конструктивные пазы сердечника. Именно способ организации или укладки обмотки ротора является ключевым критерием классификации этих машин.
Двигатели с короткозамкнутым ротором (АДКР)
Здесь используется обмотка в виде алюминиевых, медных или латунных стержней, которые вставляются в пазы сердечника и с обеих сторон замыкаются дисками (кольцами). Тип соединения этих элементов зависит от мощности двигателя: для малых значений используют метод совместной отливки дисков и стержней, а для больших – раздельное изготовление с последующей сваркой между собой. Обмотка статора подключается с использованием схем «треугольника» или «звезды».

Двигатели с фазным ротором
К сети подключается трехфазная обмотка ротора, посредством контактных колец на основном валу и щеток. За основу принимается схема «звезда». На рисунке внизу представлена типичная конструкция такого двигателя.

Асинхронный двигатель регулировка оборотов
- admin
- Стройка и ремонт
Трехфазный
Такие электромоторы большей частью используются в производстве. Принцип работы устанавливается по его конструкции – с фазным или короткозамкнутым ротором. Чтобы его запустить не нужна стартовая обмотка, конденсатор или прочие приборы. Пусковой ток, а также мощность достаточно высокие. Применяется в станках, насосах, сельхозтехнике.
Регулирование оборотов изменением числа пар полюсов
Специальные многоскоростные двигатели со сложной обмоткой регулируются путем изменения количества активных полюсов на статоре. Обмотки полюсов разбиты на группы, и чередуются, путем коммутации обмотки подключаются, то параллельно, то последовательно.
Положительные моменты данного способа.
- Высокий КПД мотора.
- Жесткие механические выходные параметры.
К недостаткам такого управления, можно отнести высокую стоимость электрической машин, а также значительный вес и габариты такого двигателя. Изменение оборотов происходит ступенькой 1500-3000 об/мин.
Асинхронные двигатели с фазным ротором
Основной способ управления АД с фазным ротором – изменение величины скольжения между статором и ротором.
Регулирование с помощью напряжения
Через специальные автотрансформаторы ЛАТР, путем изменения напряжения на обмотках двигателя, производят регулировку оборотов вала.
Данный способ так же подходит и к АД с короткозамкнутым ротором. Таким способ можно регулировать в пределах от минимума до номинальных параметров двигателя.
Установка активного сопротивления в цепи ротора
Переменное реостатное сопротивление или набор сопротивлений в цепи ротора воздействует на ток и поле ротора. Изменяя таким образом величину скольжения и количество оборотов двигателя.
Чем больше сопротивление, тем меньше ток, тем больше величина скольжения АД и меньше скорость.
Достоинства такого регулирования.
- Большой диапазон регулирования оборотами электрической машины.
- Мягкая выходная характеристика мотора.
Недостатки такого способа.
- Уменьшение КПД двигателя.
- Ухудшение рабочих характеристик механизма.
Типичные схемы регуляторов оборотов
На рынке сегодня есть широкий выбор регуляторов и частотных преобразователей для асинхронных двигателей. Тем не менее, для бытовых нужд подъемного или обрабатывающего оборудования вполне можно сделать расчет и сборку на микросхеме самодельного прибора на базе тиристоров или мощных транзисторов.
Ниже представлен пример схемы достаточно мощного регулятора для асинхронного двигателя. За счет чего можно добиться плавного контроля параметров его работы, снижения энергопотребления до 50%, расходов на техническое обслуживание.
Данная схема является сложной. Для бытовых нужд ее можно значительно упростить, используя в качестве рабочего элемента симистор, например, ВТ138-600. В этом случае схема будет выглядеть следующим образом:
Обороты электродвигателя будут регулироваться за счет потенциометра, который определяет фазу входного импульса, открывающего симистор.
Как можно судить из информации, представленной выше, от оборотов асинхронного двигателя зависят не только параметры его работы, но и эффективность функционирования питаемого подъемного или обрабатывающего оборудования. В торговой сети сегодня можно приобрести самые разнообразные регуляторы, но также можно совершить расчет и собрать эффективное устройство своими руками.
Эпилог
При всех своих достоинствах асинхронные машины имеют существенный недостаток, это рывок ротора при подаче напряжения. Такие режимы опасны как для самого двигателя, так и для приводных механизмов. Поскольку во время пуска АД, ток в обмотках двигателя приравнивается к короткому замыканию. А рывок вала разбивает подшипники, шлицы, передаточные устройства. Поэтому пуск АД стараются производить плавным стартом. А именно: